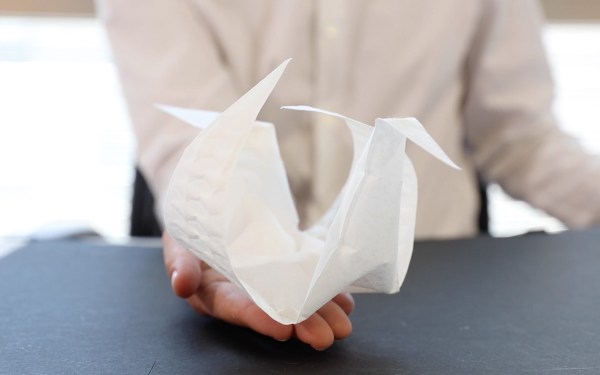
We’ve seen our fair share of soft silicone robots around here. Typically they are produced through a casting process, where molds are printed and then filled with liquid silicone to form the robot parts. These parts are subsequently removed from the molds and made to wiggle, grip, and swim through the use of pneumatic or hydraulic pumps and valves. MIT’s Self-Assembly Lab has found a way to print the parts directly instead, by extruding silicone, layer by layer, into a gel-filled tank.
The Self-Assembly Lab’s site is unfortunately light on details, but there is a related academic paper (behind a paywall, alas) that documents the process. From the abstract, it seems the printing process is intended for more general purpose printing needs, and is able to print any “photo or chemically cured” material, including two-part mixtures. Additionally, because of the gel-filled tank, the material need not be deposited in flat layers like a traditional 3D-printer. More interesting shapes and material properties could be created by using the full 3d-volume to do 3D extrusion paths.
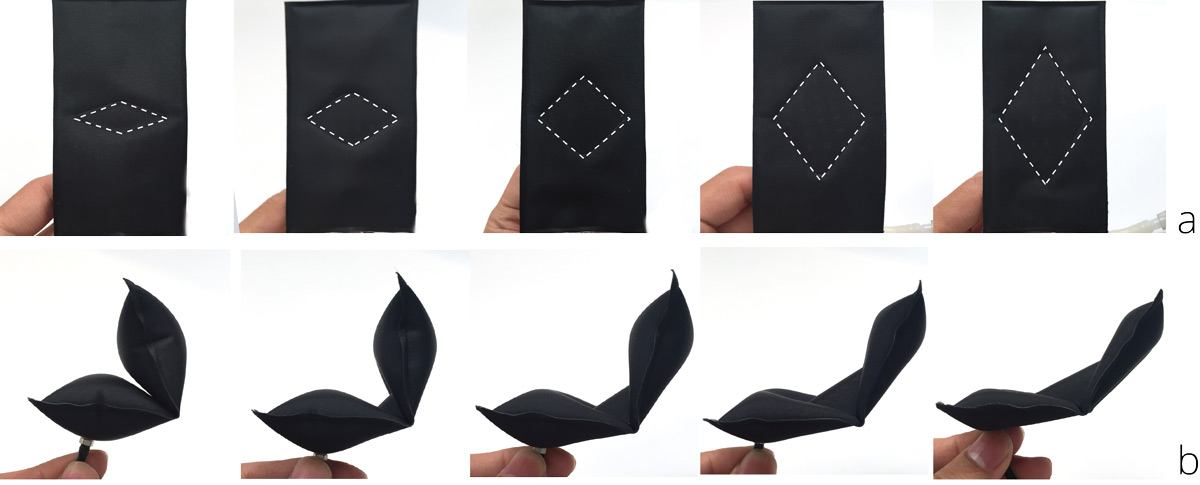
To see some of the creative shapes and mechanisms developed by MIT using this process, check out the two aesthetically pleasing videos of pulsating soft white silicone shapes after the break.
Continue reading “Soft Silicone Pneumatics Are 3D-printed In A Tub Of Gel”