Farming has been undergoing quite a revolution in the past few years. Since World War 2, most industrial farming has relied on synthetic fertilizer, large machinery, and huge farms with single crops. Now there is a growing number of successful farmers bucking that trend with small farms growing many crops and using natural methods of fertilizing that don’t require as much industry. Of course even with these types of farms, some machinery is still nice to have, so this farmer has been developing an open-source automated farming robot.
The robot is known as Acorn and is the project of [taylor] who farms in California. The platform is powered by an 800 watt solar array feeding a set of supercapacitors for energy storage. It uses mountain bike wheels and tires fitted with electric hub motors which give it four wheel drive and four wheel steering to make it capable even in muddy fields. The farming tools, as well as any computer vision and automation hardware, can be housed under the solar panels. This prototype uses an Nvidia Jetson module to handle the heavy lifting of machine learning and automation, with a Raspberry Pi to handle the basic operation of the robot, and can navigate itself around a farm using highly precise GPS units.
While the robot’s development is currently ongoing, [taylor] hopes to develop a community that will build their own versions and help develop the platform. Farming improvements like this are certainly needed as more and more farmers shift from unsustainable monocultures to more ecologically friendly methods involving multiple simultaneous crops, carbon sequestration, and off-season cover crops. It’s certainly a long row to hoe but plenty of people are already plowing ahead.
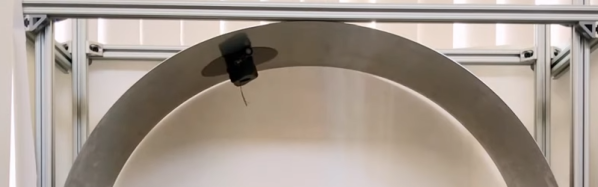
Imagine you are at the movies and you see a Roomba-like robot climbing a wall or clinging to a ceiling. How would that work? If you are like us, you might think of suction cups or something mechanical or magnetic in the wall. Then again, it is a movie, so maybe it is just a camera trick. The robots from the Bioinsipired Robotics and Design Lab at UCSD are no camera trick, though. As [Evan Ackerman] mentions in a post on IEEE Spectrum, “It’s either some obscure fluid effect or black magic.” You can watch a video about the bots, below.
It turns out, the answer is closer to a suction cup than you might think. According to the paper from the lab, a small flexible disk vibrates at 200 Hz. This generates a thin (less than 1 mm) layer of low pressure air in between the disk and the underlying surface. The robot can resist a force of up to 5 newtons from the suction from the disk.
That collective “Phew!” you heard this week was probably everyone on the Mars Ingenuity helicopter team letting out a sigh of relief while watching telemetry from the sixth and somewhat shaky flight of the UAV above Jezero crater. With Ingenuity now in an “operations demonstration” phase, the sixth flight was to stretch the limits of what the craft can do and learn how it can be used to scout out potential sites to explore for its robot buddy on the surface, Perseverance.
While the aircraft was performing its 150 m move to the southwest, the stream from the downward-looking navigation camera dropped a single frame. By itself, that wouldn’t have been so bad, but the glitch caused subsequent frames to come in with the wrong timestamps. This apparently confused the hell out of the flight controller, which commanded some pretty dramatic moves in the roll and pitch axes — up to 20° off normal. Thankfully, the flight controller was designed to handle just such an anomaly, and the aircraft was able to land safely within five meters of its planned touchdown. As pilots say, any landing you can walk away from is a good landing, so we’ll chalk this one up as a win for the Ingenuity team, who we’re sure are busily writing code to prevent this from happening again.
If wobbling UAVs on another planet aren’t enough cringe for you, how about a blind mechanical demi-ostrich drunk-walking up and down a flight of stairs? The work comes from the Oregon State University and Agility Robotics, and the robot in question is called Cassie, an autonomous bipedal bot with a curious, bird-like gait. Without cameras or lidar for this test, the robot relied on proprioception, which detects the angle of joints and the feedback from motors when the robot touches a solid surface. And for ten tries up and down the stairs, Cassie did pretty well — she only failed twice, with only one counting as a face-plant, if indeed she had a face. We noticed that the robot often did that little move where you misjudge the step and land with the instep of your foot hanging over the tread; that one always has us grabbing for the handrail, but Cassie was able to power through it every time. The paper describing how Cassie was trained is pretty interesting — too bad ED-209’s designers couldn’t have read it.
So this is what it has come to: NVIDIA is now purposely crippling its flagship GPU cards to make them less attractive to cryptocurrency miners. The LHR, or “Lite Hash Rate” cards include new-manufactured GeForce RTX 3080, 3070, and 3060 Ti cards, which will now have reduced Ethereum hash rates baked into the chip from the factory. When we first heard about this a few months ago, we puzzled a bit — why would a GPU card manufacturer care how its cards are used, especially if they’re selling a ton of them. But it makes sense that NVIDIA would like to protect their brand with their core demographic — gamers — and having miners snarf up all the cards and leaving none for gamers is probably a bad practice. So while it makes sense, we’ll have to wait and see how the semi-lobotomized cards are received by the market, and how the changes impact other non-standard uses for them, like weather modeling and genetic analysis.
Speaking of crypto, we found it interesting that police in the UK accidentally found a Bitcoin mine this week while searching for an illegal cannabis growing operation. It turns out that something that uses a lot of electricity, gives off a lot of heat, and has people going in and out of a small storage unit at all hours of the day and night usually is a cannabis farm, but in this case it turned out to be about 100 Antminer S9s set up on janky looking shelves. The whole rig was confiscated and hauled away; while Bitcoin mining is not illegal in the UK, stealing the electricity to run the mine is, which the miners allegedly did.
And finally, we have no idea what useful purpose this information serves, but we do know that it’s vitally important to relate to our dear readers that yellow LEDs change color when immersed in liquid nitrogen. There’s obviously some deep principle of quantum mechanics at play here, and we’re sure someone will adequately explain it in the comments. But for now, it’s just a super interesting phenomenon that has us keen to buy some liquid nitrogen to try out. Or maybe dry ice — that’s a lot easier to source.
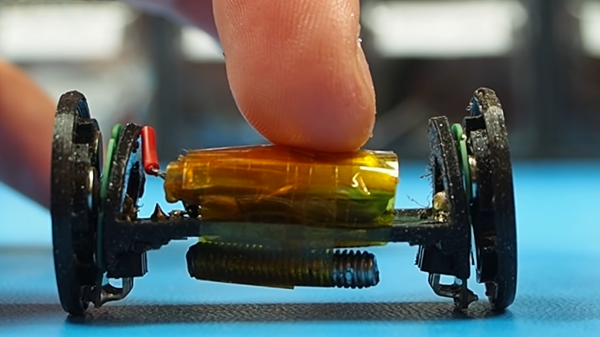
[Carl Bugeja] has been working on his PCB motors for more than three years now, and it doesn’t seem like he is close to running out of ideas for the project. His latest creation is a tiny Bluetooth-controlled robot built around two of these motors.
One of the main challenges of these axial flux PCB motors is their low torque output, so [Carl] had to make the robot as light as possible. The main board contains a microcontroller module with integrated Bluetooth, an IMU, regulator, and two motor drivers. The motor stator boards are soldered to the main board using 90° header pins. The frame for the body and the rotors for the motors are 3D printed. A set of four neodymium magnets and a bearing is press-fit into each rotor. The motor shafts are off-the-shelf PCB pins with one end soldered to the stator board. Power comes from a small single-cell lipo battery attached to the main board.
The robot moves, but with a jerking motion, and keeps making unintended turns. The primary cause of this seems to be the wobbly rotors, which mean that the output torque fluctuates throughout the rotation of the motor. Since there are only two points of contact to the ground, only the weight of the board and battery is preventing the central part from rotating with the motors. This doesn’t look like it’s quite enough, so [Carl] wants to experiment with using the IMU to smooth out the motion. For the next version, he’s also working on a new shaft mount, a metal rotor, and a more efficient motor design.
We look forward to seeing this in action, and also what other application [Carl] can come up with. He has already experimented with turning it into a stepper motor, a linear motor, and a tiny jigsaw motor.
[Ramin assadollahi] has been busy rebuilding and improving an Omnibot 5402, and the last piece of hardware he wanted to upgrade was some LED matrix eyes and a high quality Raspberry Pi camera for computer vision. An Omnibot was something most technical-minded youngsters remember drooling over in the 80s, and when [ramin] bought a couple of used units online, he went straight to the workbench to give the vintage machines some upgrades. After all, the Omnibot 5402 was pretty remarkable for its time, but is capable of much more with some modern hardware. One area that needed improvement was the eyes.
The eyes on the original Omnibot could light up, but that’s about all they were capable of. The first upgrade was installing two 8×8 LED matrix displays to form what [ramin] calls Minimal Expressive Eyes (MEE), powered by a Raspberry Pi. With the help of a 3D-printed adapter and some clever layout, the LED matrix displays fit behind the eye plate, maintaining the original look while opening loads of new output possibilities.
Adding a high quality Raspberry Pi camera with wide-angle lens was a bit more challenging and required and extra long camera ribbon connector, but with the lens nestled just below the eyes, the camera has a good view and isn’t particularly noticeable when the eyes are lit up. Having already upgraded the rest of the hardware, all that remains now is software work and we can’t wait to see the results.
Two short videos of the hardware are embedded below, be sure to give them a peek. And when you’re ready for more 80s-robot-upgrading-action, check out the Hero Jr.
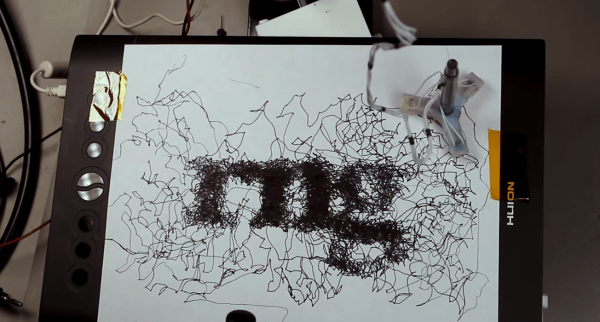
For the price of a toothbrush and a small motor with an offset weight, a bristlebot is essentially the cheapest robot that can be built. The motor shakes the toothbrush and the bristle pattern allows the robot to move, albeit in a completely random pattern. While this might not seem like a true robot that can interact with its environment in any meaningful way, [scanlime] shows just how versatile this robot – which appears to only move randomly – can actually be used to make art in non-random ways.
Instead of using a single bristlebot for the project, three of them are built into one 3D printed flexible case where each are offset by 120°, and which can hold a pen in the opening in the center. This allows them to have some control on the robot’s direction of movement. From there, custom software attempts to wrangle the randomness of the bristlebot to produce a given image. Of course, as a bristlebot it is easily subjected to the whims of its external environment such as the leveling of the table and even the small force exerted by the power/communications tether.
With some iterations of the design such as modifying the arms and control systems, she has an interesting art-producing robot that is fairly reliable for its inherently random movements. For those who want to give something like this a try, the code for running the robot and CAD files for 3D printing the parts are all available on the project’s GitHub page. If you’re looking for other bristlebot-style robots that do more than wander around a desktop, be sure to take a look at this line-following bristlebot too.
Well, that de-escalated quickly. It seems like no sooner than a paper was announced that purported to find photographic evidence of fungi growing on Mars, that the planetary science and exobiology community came down on it like a ton of bricks. As well they should — extraordinary claims require extraordinary evidence, and while the photos that were taken by Curiosity and Opportunity sure seem to show something that looks a lot like a terrestrial puffball fungus, there are a lot of other, more mundane ways to explain these formations. Add to the fact that the lead author of the Martian mushroom paper is a known crackpot who once sued NASA for running over fungi instead of investigating them; the putative shrooms later turned out to be rocks, of course. Luckily, we have a geobiology lab wandering around on Mars right now, so if there is or was life on Mars, we’ll probably find out about it. You know, with evidence.
If you’re a fan of dystopic visions of a future where bloodthirsty robots relentlessly hunt down the last few surviving humans, the news that the New York Police Department decided to stop using their “DigiDog” robot will be a bit of a downer. The move stems from outrage generated by politicians and citizens alike, who dreamt up all sorts of reasons why the NYPD shouldn’t be using this tool. And use it they apparently did — the original Boston Dynamics yellow showing through the many scuffs and dings in the NYPD blue paint job means this little critter has seen some stuff since it hit the streets in late 2020. And to think — that robot dog was only a few weeks away from filing its retirement papers.
Attention, Commodore fans based in Europe: the Commodore Users Europe event is coming soon. June 12, to be precise. As has become traditional, the event is virtual, but it’s free and they’re looking for presenters.
In a bid to continue the grand Big Tech tradition of knowing what’s best for everyone, Microsoft just announced that Calibri would no longer be the default font in Office products. And here’s the fun part: we all get to decide what the new default font will be, at least ostensibly. The font wonks at Microsoft have created five new fonts, and you can vote for your favorite on social media. The font designers all wax eloquent on their candidates, and there are somewhat stylized examples of each new font, but what’s lacking is a simple way to judge what each font would actually look like on a page of English text. Whatever happened to “The quick brown fox” or even a little bit of “Lorem ipsum”?
And finally, why are German ambulances — and apparently, German medics — covered in QR codes? Apparently, it’s a way to fight back against digital rubberneckers. The video below is in German, but the gist is clear: people love to stop and take pictures of accident scenes, and smartphones have made this worse, to the point that emergency personnel have trouble getting through to give aid. And that’s not to mention the invasion of privacy; very few accident victims are really at their best at that moment, and taking pictures of them is beyond rude. Oh, and it’s illegal, punishable by up to two years in jail. The idea with the QR codes is to pop up a website with a warning to the rubbernecker. Our German is a bit rusty, but we’re pretty sure that translates to, “Hey idiot, get back in your frigging car!” Feel free to correct us on that.