A pet tracker has a particularly grueling set of requirements: small, light, rugged, incredibly long battery life, safe for the pet, and cheap. [Mihai Cuciuc] was looking at the options and wasn’t thrilled with any of them. So as any hacker would, he rolled his own, dubbed Squeak.
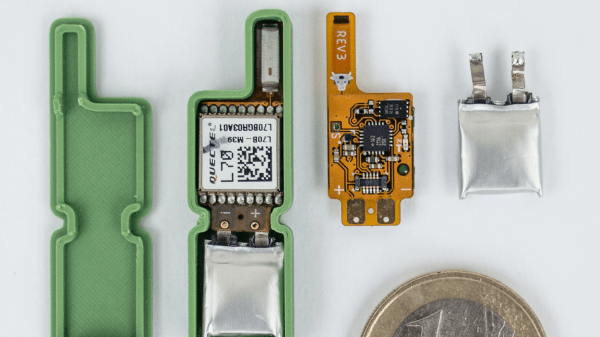
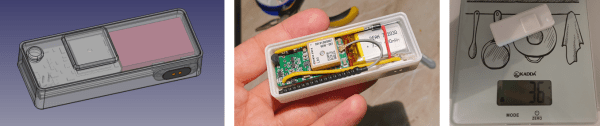
It uses an RN2483 module as it is a LoRAWAN module with publically available firmware from Microchip itself. This means [Mihai] could add his code and keep the modem code without having to reverse engineer everything or add a second microcontroller. In addition to the modem, there’s a GPS unit connected via UART. The clever part is the dual voltage regulators — the one powering the GPS is enabled or disabled by the RN2483. In addition, the RAM V_BACKUP line is always powered, which means the RN2483 can power up the GPS and let it get a quick fix (thanks to the RAM backup line).
To maximize the chances of a packet making it through, he made them only have the bare essentials. There are return packets to change the tracker’s mode (such as uplink interval or how often to capture GPS). With some cloud support, [Mihai] created infrastructure to capture the packets and relay them to Telegram. He can request the last location, receive updates, and change modes.
We’ve got you covered if you’re interested in tracking some of your dog’s other habits.