Computing used to run on punch cards. Great stacks of cards would run middling programs, with data output onto more punched cards in turn. [Nii] has built a machine in this vein, capable of punching binary into paper tape.
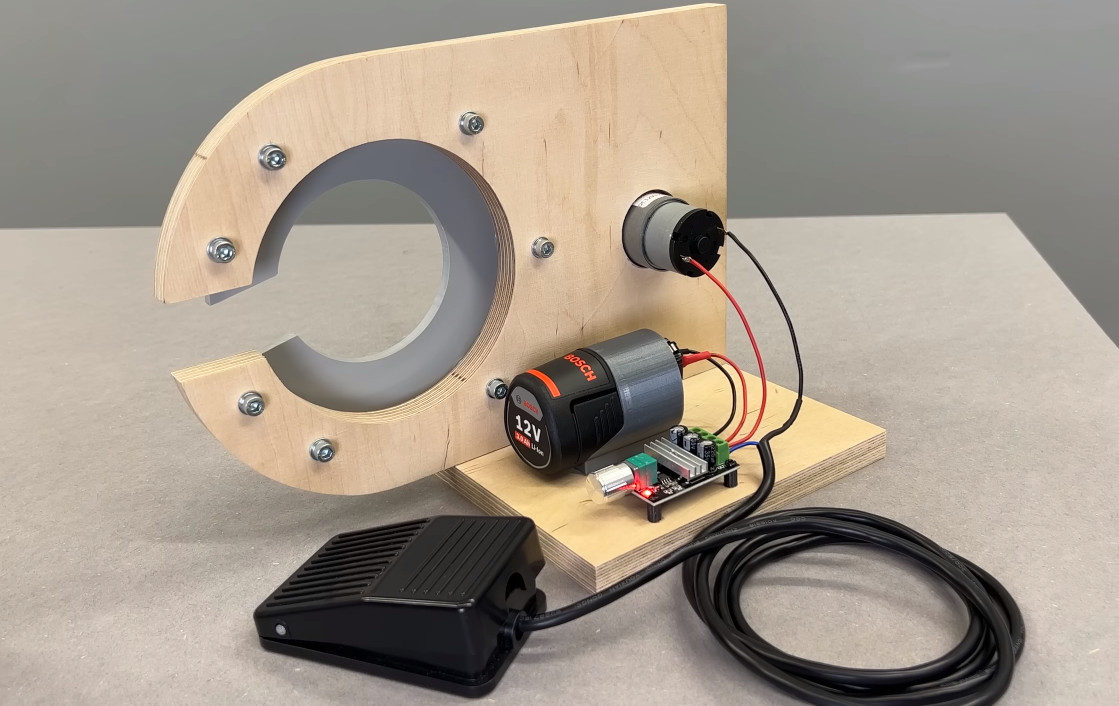
The machine is run by a stepper motor, which is charged with feeding the paper tape through the machine in steady steps. A series of vertically-actuated solenoids punch holes in the paper tape as directed. The machine buzzes and clicks away like the best electromechanical computing devices of the mid-century era.
To what end, we couldn’t possibly say. One user noted the machine was punching seemingly random binary into the paper tape, and [Nii] has not provided any explanation as to the machine’s higher purpose. Regardless, whatever it is doing, it looks like it’s doing it well. Feel free to speculate in the comments.
Impressively, the petite device will be demonstrated at MF-TOKYO, the 7th Annual Metal Forming Fair in Tokyo this year. We’re sure the clickity-clack will be muchly appreciated in person. Video after the break.
Continue reading “Paper Punching Machine Looks Like Cute Piece Of Computer History Past”
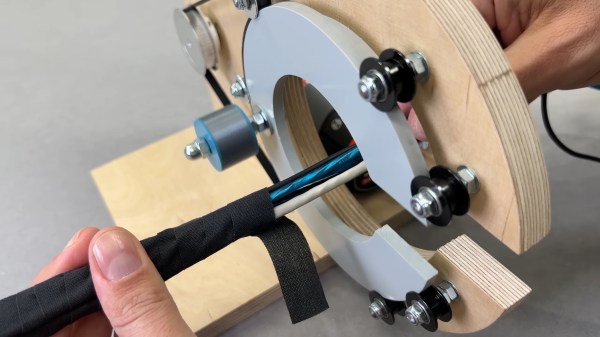
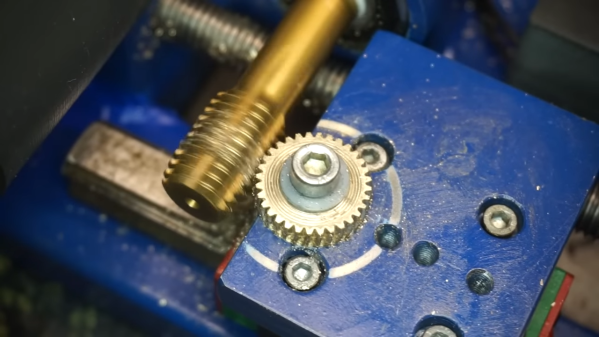
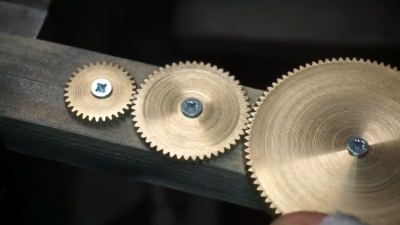 The cutting tool for the job is an M16 machine tap, chosen for the smaller flutes compared to a hand tap. This makes it more suitable for cutting gears. It’s turned by a belt driven pulley, run by a small motor. The workpiece to be cut into a gear is then fed into the cutting tool by sliding on a linear bearing, with its position controlled by a threaded rod. The rod can be slowly turned by hand to adjust the workpiece position, to allow the gear teeth to be cut to an appropriate depth.
The cutting tool for the job is an M16 machine tap, chosen for the smaller flutes compared to a hand tap. This makes it more suitable for cutting gears. It’s turned by a belt driven pulley, run by a small motor. The workpiece to be cut into a gear is then fed into the cutting tool by sliding on a linear bearing, with its position controlled by a threaded rod. The rod can be slowly turned by hand to adjust the workpiece position, to allow the gear teeth to be cut to an appropriate depth.