[Engineezy] might have been watching a 3D printer move when inspiration struck: Why not build a robot arm to clean up his workbench? Why not, indeed? Well, all you need is a 17-foot-long X-axis and a gripper mechanism that can pick up any strange thing that happens to be on the bench.
Like any good project, he did it step by step. Mounting a 17-foot linear rail on an accurately machined backplate required professional CNC assistance. He was shooting for a 1mm accuracy, but decided to settle for 10mm.
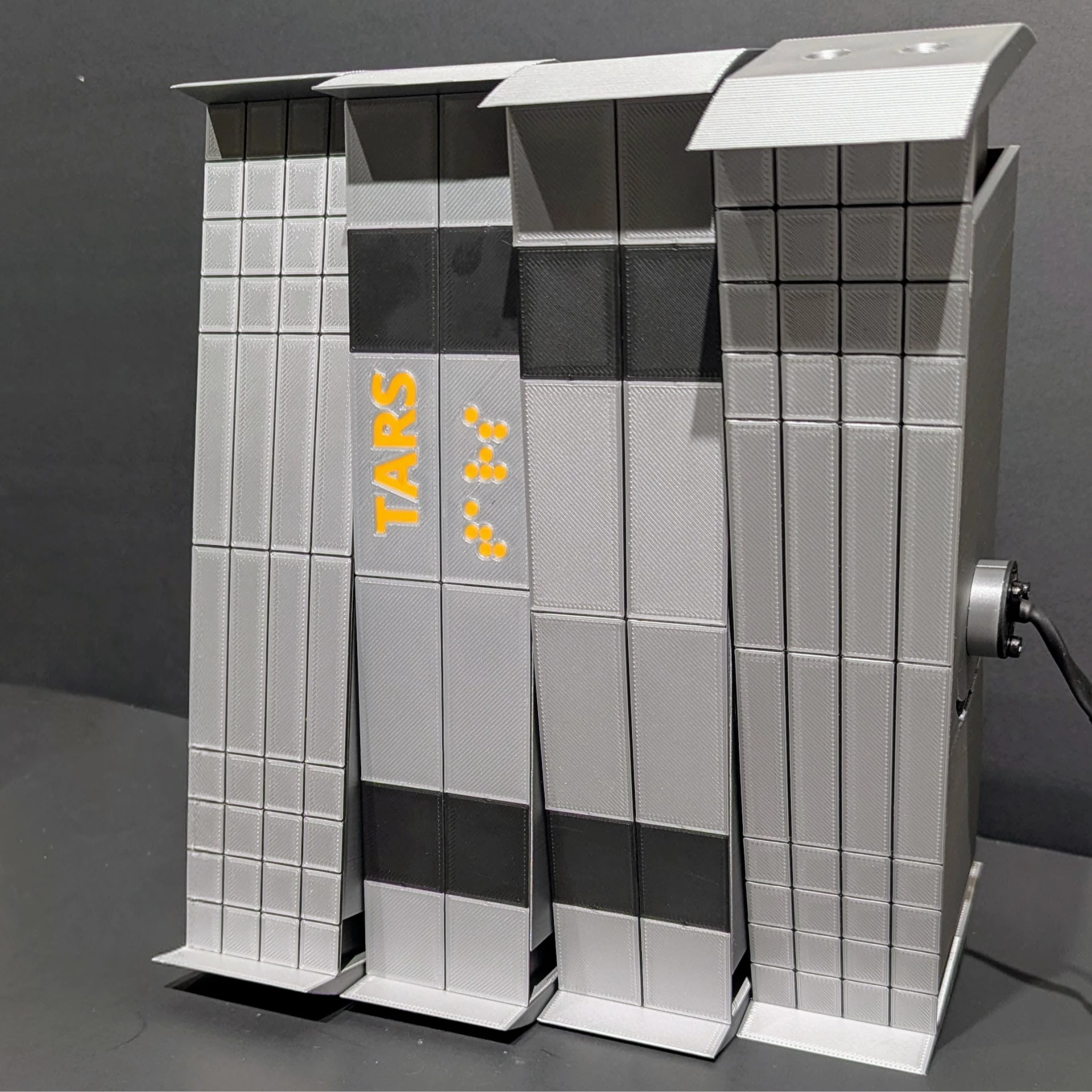
[Aditya Sripada] and [Abhishek Warrier]’s TARS3D robot came from asking what it would take to make a robot with the capabilities of TARS, the robotic character from Interstellar. We couldn’t find a repository of CAD files or code but the research paper for TARS3D explains the principles, which should be enough to inspire a motivated hacker.
What makes TARS so intriguing is the simple-looking structure combined with distinct and effective gaits. TARS is not a biologically-inspired design, yet it can walk and perform a high-speed roll. Making real-world version required not only some inspired mechanical design, but also clever software with machine learning.
[Aditya] and [Abhishek] created TARS3D as a proof of concept not only of how such locomotion can be made to work, but also as a way to demonstrate that unconventional body and limb designs (many of which are sci-fi inspired) can permit gaits that are as effective as they are unusual.
TARS3D is made up of four side-by-side columns that can rotate around a shared central ‘hip’ joint as well as shift in length. In the movie, TARS is notably flat-footed but [Aditya] found that this was unsuitable for rolling, so TARS3D has curved foot plates.
The rolling gait is pretty sensitive to terrain variations, but the walking gait proved to be quite robust. All in all it’s a pretty interesting platform that does more than just show a TARS-like dual gait robot can be made to actually work. It also demonstrates the value of reinforcement learning for robot gaits.
A brief video is below in which you can see the bipedal walk in action. Not that long ago, walking robots were a real challenge but with the tools available nowadays, even a robot running a 5k isn’t crazy.
If you’re really good, it’s possible to solve a Rubik’s Cube in under 10 seconds. For the rest of us, though, it can be an exceedingly tedious task. For that reason, you might like a Rubik’s Cube that can solve itself, like the one [zeroshot] is trying to build.
What [zeroshot] built is essentially a very small robotic platform inside the center section of an existing Rubik’s Cube. It uses five gear motors that are assembled into the cube’s core, which have enough torque to rotate the individual faces quite easily. While six motors would allow more efficient solves in fewer moves, it was easier to fit just five motors inside the cube, and they’d still get the job done. The motors are controlled by an ESP32, hooked up to a bank of DRV8833 motor drivers. For now, the cube is still a work in progress. While the core can move the faces, [zeroshot] is trying to figure out how to best tackle the problem of feedback in the limited space available. After all, the ESP32 needs to know where the faces are if it’s to make the right moves to reach a solved state. Soldering wires between individual modules can be quite space inefficient; this is one build that might benefit from being integrated onto a single tiny PCB.
If there’s any one benefit to having a cat as a pet instead of a dog, it’s that they’re a bit more independent and able to care for themselves for many days without human intervention. The only thing that’s really needed is a way to make sure they get food and water at regular intervals, but there are plenty of off-the-shelf options for these tasks. Assuming your cat can be fed dry food, that is. [Ben Heck]’s cat has a health problem that requires a special canned wet food, and since there aren’t automatic feeders for this he built his own cat-feeding robot.
Unlike dry food that can dispense a measured amount from a hopper full of food, the wet food needs to be opened and dispensed every day. To accomplish this, his robot has a mechanism that slowly slides a wedge under the pull tab on the can, punctures the can with it, and then pulls it back to remove the lid. From there the food is ejected from the feeder down a ramp to a waiting (and sometimes startled) cat. The cans are loaded into 3D-printed cartridges and then stacked into the machine on top of each other, so the machine can dispense food cans until it runs out. This design has space for six cans.
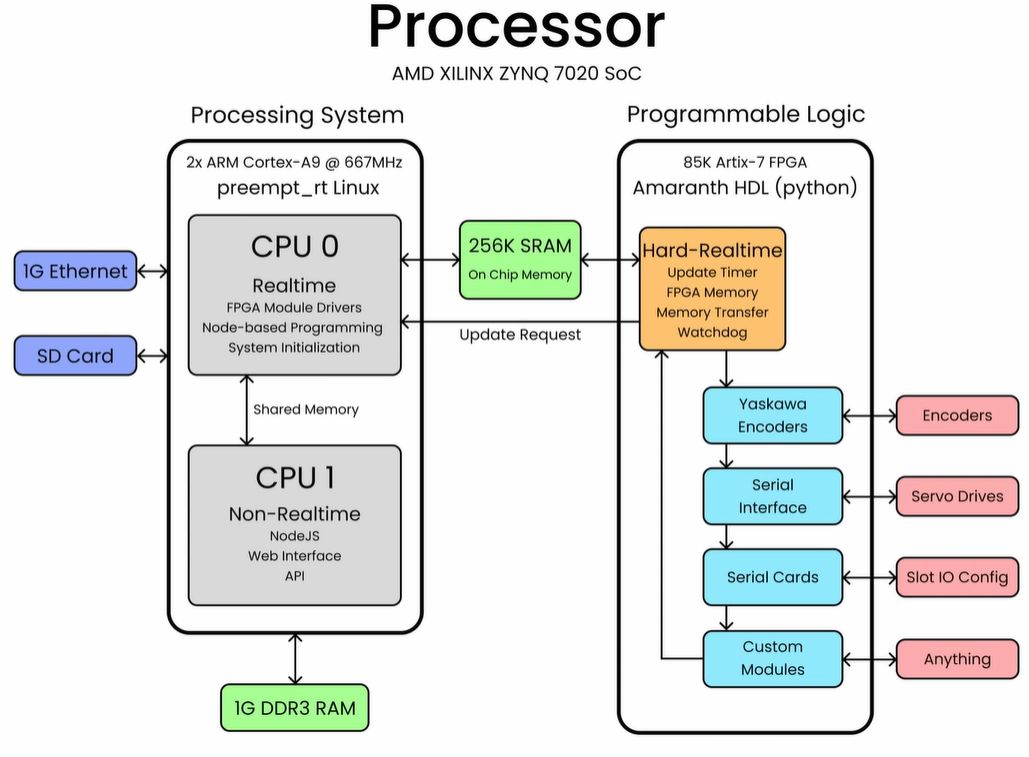
The Zynq-7000 usage at the core of the robot controller. (Credit: Excessive Overkill, YouTube)
Industrial robots like robotic arms are basically everywhere, albeit usually out of the public’s eye in factories. This also means that they get replaced and scrapped all the time, making for many opportunities to snap up an industrial robot that once cost as much as a pretty fancy car for essentially peanuts. Over the years the bloke behind the [Excessive Overkill] YouTube channel did this a lot, which also revealed the main issue with these ‘cheap’ robots: the electronics and associated software, with the manufacturer rarely going out of their way to appease to hobbyists trying to fix up one of these units, never mind for free.
That said, if you’re persistent enough, you can reverse-engineer these beasts to the point where you can develop your own controller hardware and software solution. This is exactly what was done, resulting in an open source controller, found on the ExcessiveMotion GitHub page, that should allow you to control many of these industrial robots. At the core is a Zynq-7000 hybrid FPGA-ARM SoC chip, running real-time Linux (with preemptive scheduling patch) on the SoC side and custom HDL on the FPGA side to handle the hard real-time tasks.
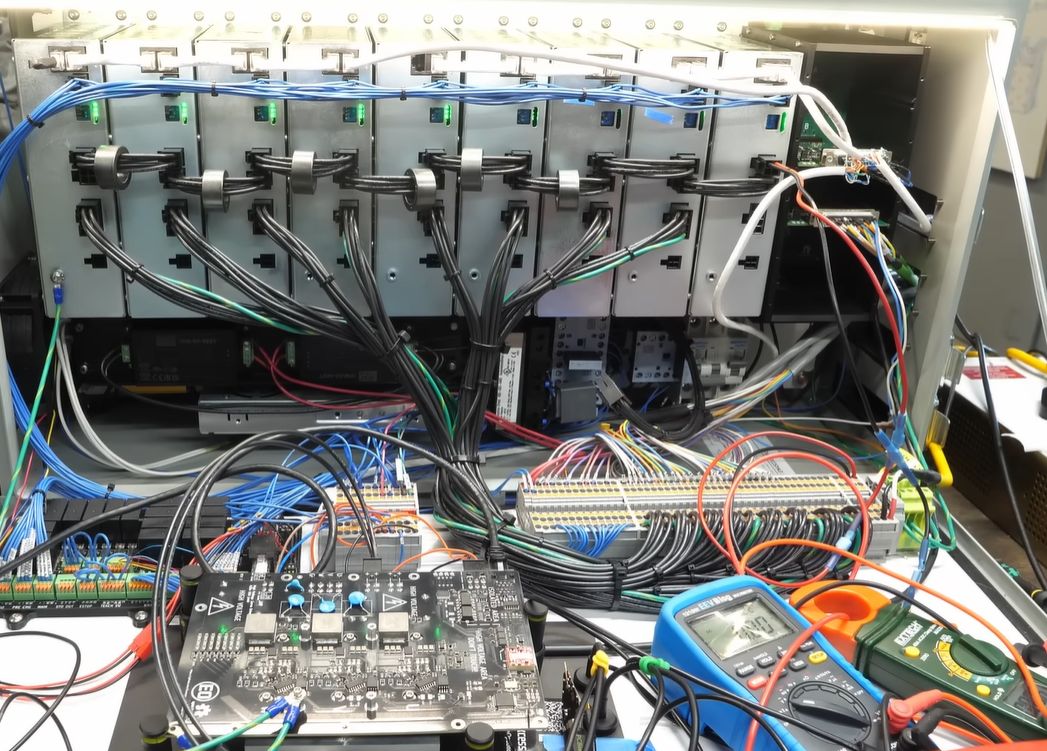
The controller during testing. (Credit: Excessive Overkill, YouTube)
The controller is made to be modular, with a backplane that can accept various interface cards in addition to the current RS-485 and RS-422 interfaces that are commonly used in industrial settings, such as here for controlling the individual servo drives of the robots. To make assembly and testing interesting, the first controller and integration with a robot was made ready for display at the Open Sauce 2025 event, requiring things to be rushed along, including reverse-engineering the servo protocol for a small-ish industrial robot suitable for public display and use, as well as developing the kinematics for the robotic arm.
With the controller now demonstrated, clearly this is the perfect time to rush out and get one of these fun industrial robots for a few hundred bucks. Currently the controller is still being finalized, with the author asking for feedback on what it should be able to support. If you have a particularly unusual industrial robot lounging around without the requisite controller, this might be your chance to revive it.
Do you remember the movie WALL-E? Apparently, [Leviathan engineering] did, and he wasn’t as struck by the title character, or Eva, or even the Captain. He was captivated by BURN-E. His working model shows up in the video below.
We’ll be honest. BURN-E didn’t ring a bell for us, though we remember the movie. He grabbed a 3D design for the robot on the Internet and planned out holes for some servos and other hardware.
As the old saying goes, when the only tool you have is a 6 DOF industrial robotic arm, every problem looks like an opportunity to make it serve up adult beverages. [benkokes] found himself in this familiar predicament and did what any of us would do, but his process wasn’t without a few party fouls as well as a few head-scratchers.
One of the common problems that people who suddenly find themselves with an old industrial robot have is that there’s usually no documentation or instructions. This was true here with the added hiccup of the robot’s UI being set to Chinese. Luckily no one had changed the root password, and eventually he was able to get the robot up and working.
Getting it to make drinks was a different matter altogether. [benkokes] needed a custom tool to hold the cup as well as shake it, and 3D printed a claw-style end effector with a lid. Out of his multi-colored pack of party cups, however, the orange cups were different enough in dimension to cause problems for the shaking lid which was discovered when the robot spilled a drink all over the table.
Eventually, though, the robot was successfully serving drinks at a party. One of [benkokes]’s friends happened to be a puppet maker and was able to outfit it with a tailored tuxedo for the party as well, and he also programmed it to dance in between serving drinks, completing the AI revolution we have all been hoping for. Perhaps unsurprisingly, this is a common project for people who suddenly come to posses a large general-purpose industrial robot, while others build robots specifically for this task alone.