Robotics has advanced in leaps and bounds over the past few decades, but in terms of decentralized coordination in robot swarms, they far behind biological swarms. Researchers from Harvard University’s Weiss Institute are working to close the gap, and have developed Blueswarm, a school of robotic fish that can exhibit swarm behavior without external centralized control.
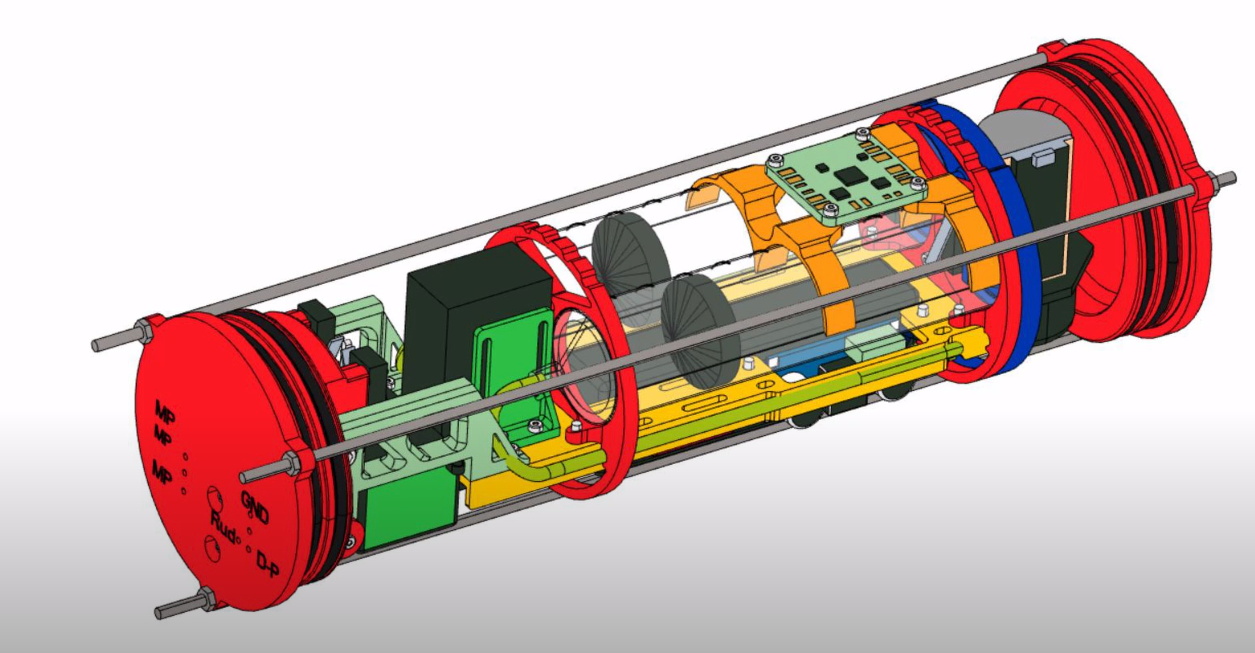
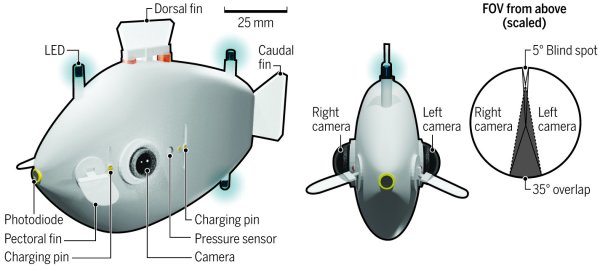
In real fish schools, the movement of an individual fish depends on those around it. To allow each robotic fish to estimate the position of its neighbors, they are equipped with a set of 3 blue LEDs, and a camera on each side of the body. Four oscillating fins, inspired by reef fish, provide 3D control. The actuator for the fins is simply a pivoting magnet inside a coil being fed an alternating current. The onboard computer of each fish is a Raspberry Pi W, and the cameras are Raspberry Pi Camera modules with wide-angle lenses. Using the position information calculated from the cameras, the school can coordinate its movements to spread out, group together, swim in a circle, or find an object and then converge on it. The full academic article is available for free if you are interested in the details.
Communication with light is dependent on the clarity of the medium it’s traveling through, in this case, water — and conditions can quickly become a limiting factor. Submarines have faced the same challenge for a long time. Two current alternative solutions are ELF radio and sound, which are both covered in [Lewin Day]’s excellent article on underwater communications.
Continue reading “Robotic Fish Swarm Together Using Cameras And LEDs”