With just a couple of rigid struts attached to the shins of the rear legs, it becomes possible for the robot to lever itself up into a stable standing position, and even shuffle around a bit. Not bad for a couple bolted-on bits with no moving parts!
The image here should make it clear how it works, but take a moment to also watch the short video embedded just below the page break, and see the process in action from beginning to end.
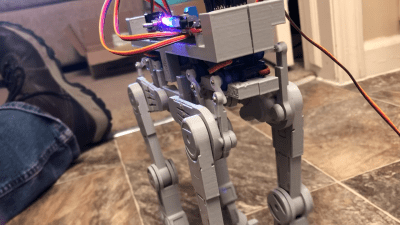
The AT-AT Walker was one of the more fearsome weapons of the Star Wars universe, even if it was incredibly slow and vulnerable to getting tangled up in Rebel tow cables. However, you can build your own small-scale example using servos for propulsion, as [Luke J. Barker] ably demonstrates.
Taking off the outer shell reveals the servo motors driving the leg linkages.
The build is a remix of the motorized AT-AT from [LtDan] on Thingiverse, originally powered by a 90 rpm DC gearmotor. [Luke] remixed the design, setting it up to be driven by eight servomotors instead. They’re controlled from a SparkFun RedBoard Edge, an Arduino-compatible microcontroller board that fits rather neatly inside the AT-AT shell.
Programmed with a simple sine-wave walk cycle, the AT-AT ambles along in a ponderous manner. It’s altogether very much like the real fictitious thing, albeit without the scorching sizzle of blaster fire ringing out across a frozen plain.
Quadruped vehicles never really caught on for military use, but that’s not to say nobody ever tried. Video after the break.
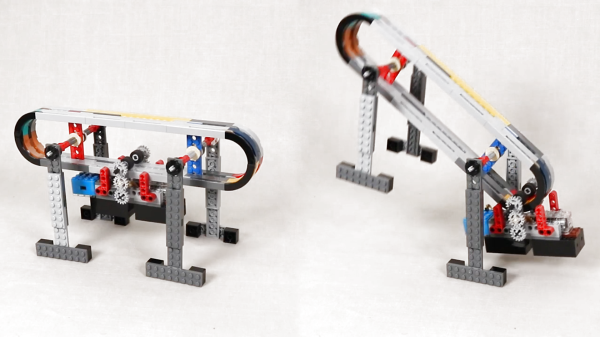
Lego Technic is a wonderful thing, making it easy to toy around with all manner of complicated mechanical assemblies without needing to do any difficult fabrication. [touthomme] recently posted one such creation to Reddit – a walker design that is rather unconventional.
The design dispenses with individually-actuated legs entirely. Instead, the two front legs are joined by an axle which pivots the legs about the body, which is shaped like an oval track. The rear legs are the same. A motorized carriage then travels along the oval track. When the weighted carriage reaches the front of the oval track, it forces the body to tip forwards, pivoting around the front legs and flipping the entire body over, swinging the rear legs forwards to become the front. The cycle then repeats again.
The flipping design, inspired by a toy, is something you wouldn’t expect to see in nature, as few to no animals have evolved mechanisms capable of continual rotation like this. It’s also unlikely to be a particularly efficient way of getting around, and the design would certainly struggle to climb stairs.
Some may claim the method of locomotion is useless, but we don’t like to limit our imaginations in that way. If you can think of a situation in which this walker design would be ideal, let us know in the comments. Alternatively, consider other walking designs for your own builds. Video after the break.
If you watch it on TV or see clips on YouTube, you’ll notice that most combat robots have wheels, which would make sense. They are simple, work well, and if designed right they can take a bit of a beating. So why did [Luke] design his 12-pound bot with no wheels, or any locomotion system for that matter? You can find out more about this peculiar bot in his build report with more than 130 images.
[Luke’s] bot, called Kitten Mittens, is a gyro walker combat robot. This means that instead of traditional tank treads or wheels to move about, [Luke] navigates by angling his bot’s weapon and using the angular momentum to lift up one side of the bot to “walk” forward. Watch the video after the break to see it in action. While this does leave Kitten Mittens much slower and less agile than competitors, it gives one massive leg up; weight. Kitten Mittens fights in the 12-pound combat robotics weight class, but most leagues have weight bonuses for bots that have no wheels or use otherwise nontraditional locomotion. Where [Luke] competes, the Norwalk Havoc Robot League, this means that his bot can be up to 6 pounds heavier than the other competitors!
A printed prototype of the weapon, showing off the integrated hub motor.
So how did [Luke] take advantage of that extra 6 pounds? The biggest thing was the weapon. It is made of 3/4-inch S7 tool steel and has a custom hub motor integrated into the center, bringing its rotating weight to 5.5 pounds. In addition to thickness, the added weight allowance permitted a larger spinning diameter so that Kitten Mittens could hit opponents before they hit him.
[Luke] is not new to the world of combat robotics, and knew it would take more than just a big weapon to win. Part of the extra weight budget was also used to beef up his armor and internal structure of the bot, so that hits from opponents would just bounce him around the cage harmlessly. This even included custom bent titanium guards surrounding the weapon, to help in self-righting.
When it first debuted in February of 2021, Kitten Mittens was a smashing success! It went 4-0 in the 12lb weight class at NHRL, winning the $1,000 prize and earning its spots in the annual finals, where [Luke] will compete against other finalists from the rest of the season for a chance to win the $12,000 first-place prize.
Bots that walk, shuffle, or crawl are becoming more of a trend lately in all weight classes. Even Overhaul, a 250-pound bot, has been given a new set of feet to shuffle around on. You can read more about this interesting concept here.
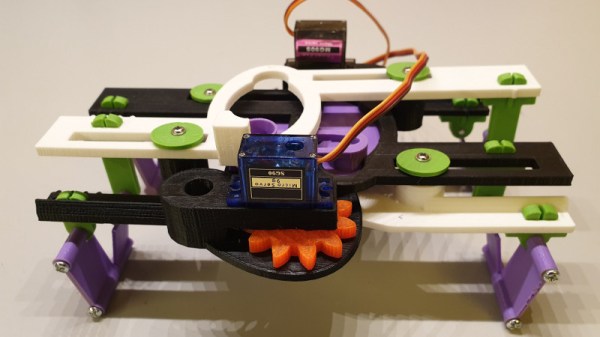
Humans make walking look simple, but of course that’s an illusion easily shattered by even small injuries. Losing the ability to walk has an enormous impact on every part of your day, so rehabilitative advances are nothing short of life-changing. The Open Exosuit for Differently Abled project is working feverishly on their Hackaday Prize entry to provide a few different layers of help in getting people back on their feet.
We’ve seen a number of exosuit projects in the past, and all of them struggle in a few common places. It’s difficult to incorporate intuitive user control into these builds, and quite important that they stay out of the way of the user’s own balance. This one approaches those issues with the use of a walker that both provides a means of steadying one’s self, and facilitates sending commands to the exosuit. Using the OLED screen and buttons incorporated on the walker, the user can select and control the walking, sitting, and standing modes.
The exoskeleton is meant to provide assistance to people with weakness or lack of control. They still walk and balance for themselves, but the hope is that these devices will be an aid at times when human caregivers are not available and the alternative would be unsteady mobility or complete loss of mobility. Working with the assistive device has the benefit of continuing to make progress in strengthening on the march to recovery.
The team is hard at work on the design, and with less than two weeks left before the entry deadline of the 2020 Hackaday Prize, we’re excited to see where the final push will bring this project!
Prolific maker [Jeremy Cook] recently put the finishing touches (at least, for now) on his impressive ClearCrawler remote controlled Strandbeest, which includes among other things a surprisingly expressive “head” complete with LED matrix eyes. For anyone in the audience who was only mildly terrified of these multi-legged robotic beasties before, you may want to avert your eyes from the video after the break.
The clever locomotive design of [Theo Jansen] known as Strandbeest is a legged walker. What makes it special is that the legs themselves are not independent, but work together for a gliding action more akin to wheeled bots. [Jeremy’s] work with ClearCrawler has taken this to another level of precision and mechanization.
Before installation of the electronics, the ClearCrawler had to be tethered to a bench power supply, and could only move forward and backward. Once the locomotion was working as expected, [Jeremy] was ready to install some brains into the beast.
The robot is controlled by a dual motor driver and an Arduino Nano socketed in an I/O expansion board. Communication between the Nano onboard the walker and the hand-held remote control is provided by of a pair of nRF24L01 modules. The controller itself is a simple affair, comprised of a joystick shield plugged into an Arduino Uno.
The robot’s head is made up of a chunk of clear polycarbonate tube with a 3D printed internal frame to hold the dual 8×8 LED matrices that serve as its animated eyes. This arrangement is mounted on a servo pan and tilt mount, which is controlled by an analog stick on the controller. While the head doesn’t currently serve any practical function, it does give [Jeremy] a chance to emote a bit with his creation; a popular trick when he shows the ClearCrawler off.
A few years ago we covered this robot’s predecessor, the considerably larger ClearWalker. While that machine was surely a beauty to behold, this smaller and more agile iteration of the concept is quite a bit more practical.
Walking robots have a rich history both on and off the storied pages of Hackaday, but if you will pardon the expression, theirs is not a field that’s standing still. It’s always pleasing to see new approaches to old problems, and the Landbeest built by [Dejan Ristic] is a great example.
It’s a four-legged walker with a gait dictated by a cam-and-follower mechanism that allows it to perform the full range of leg movement with only one motor. Each cam can control more than one leg in synchronisation, and in his most recent prototype, there are two such mechanisms that work on opposite corners of a four-legged machine. The legs are arranged in such a way that the two corner-to-corner pairs pivot at their centres in a similar manner to a pair of scissors; allowing a servo to steer the robot as it walks.
The result certainly isn’t as graceful as [Theo Janssen]’s Strandbeest, from which it evidently takes inspiration for its name, but it’s no less capable for it. After the break you can see a video he’s posted which clearly illustrates its operation and demonstrates its ability to traverse obstacles.
The only thing that’s missing are the files and software should you wish to create your own. He’s unapologetic about this, pointing out that he’d prefer to wait until he is satisfied with it before letting it go. Since he’s put a lot of work in so far and shows no sign of stopping, we’re sure he’ll reach that point soon enough.