
A high-resolution LCD or OLED screen is a commodity component that we can buy on a little breakout board and plug into our microcontrollers without spending more than a dollar or two. We can buy them in sizes ranging from sub-postage-stamp to desktop TV if our budgets stretch that far, and they are easy to drive in every sense of the word. It is not so long ago though that a high-resolution LCD, even a small one, was a seriously expensive component. In consumer electronic devices such as camcorders engineers went to great lengths to avoid those costs, and [12voltvids] recently took a look at one of them.
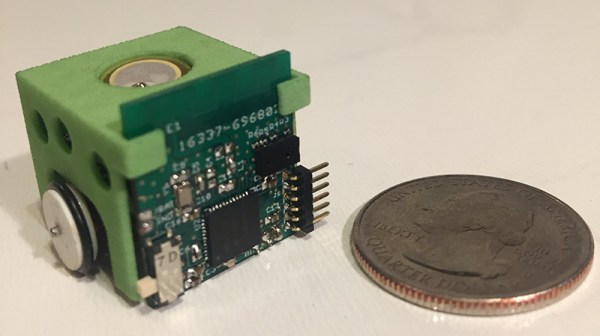
Inside the viewfinder of a miniaturized Sony camcorder is a CRT. It’s fairly mundane in the scheme of CRTs, in that it’s a monochrome device with no unexpected features. Except that is, for one thing. It’s tiny, with only a 0.5″ inch screen size. Everything else is the same as your vintage full-sized TV, it has an electron gun and a deflection and focusing coil pack, but the entire device has been miniaturized to the point at which the coil pack is larger than the screen it is driving. On the accompanying PCB are all the support circuits, including a tiny flyback transformer and a single IC – a Rohm BA7149 electronic viewfinder driver that is as near as possible an entire CRT TV on a chip. That’s it, the whole device runs from a single 5 volt supply.
He doesn’t give the date of the camcorder, but given that it looks as though it uses 8mm cassette tapes and has a curved miniaturized design rather than the angular black exteriors that were fashionable earlier we’d guess it to be from some time around the year 2000. To give it some context, at the time one of the hottest pieces of consumer electronics would have been a Diamond Rio MP3 player, and if your desktop PC had the first of the AMD Athlon processors you probably considered it to be about the fastest you could hope to own. The surprise then is that Sony still considered it more economical even at that point to use the CRT and associated circuitry than a tiny LCD. Either way we’d agree with him that it’s a keeper, a fascinating curio for any electronics enthusiast. If we see an old camcorder going for not a lot, we’ll certainly give it a second look after this.
Continue reading “A Look At The Smallest Magnetic Deflection CRT Ever Made”





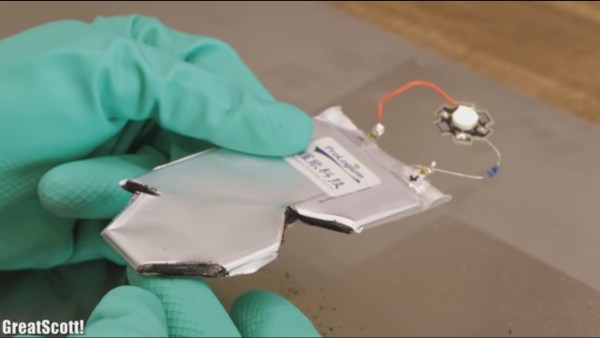
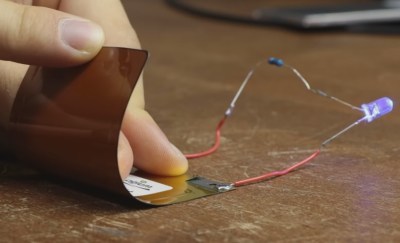 The FLCBs were rated at 100 mAh and just 2 C, both small values but still useful for wearables, especially given their flexibility. Doing some destructive testing, he managed to keep an LED lit while flexing the battery and cutting away at it with tin snips.
The FLCBs were rated at 100 mAh and just 2 C, both small values but still useful for wearables, especially given their flexibility. Doing some destructive testing, he managed to keep an LED lit while flexing the battery and cutting away at it with tin snips.








