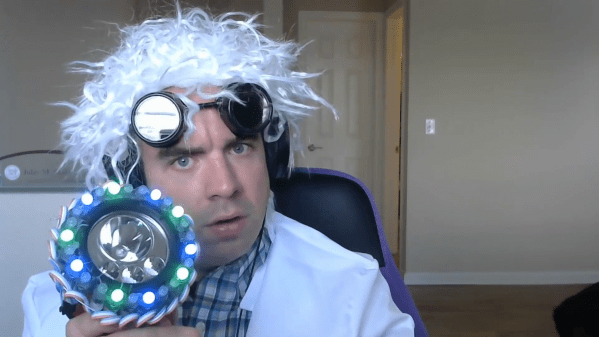
Halloween may have come and gone for another year, but we’re still finding neat spooky projects lurking out on the Interwebs. Case in point, the Ghost Detector 9000 from [Jules].
Effectively, what you’re looking at here is a fun interactive ghost-detecting game. It consists of a Raspberry Pi Zero hooked up with an IMU sensor that can detect the rig’s movement and orientation. As the user moves the Ghost Detector 9000 around, it outputs lights and sound when it’s aimed at a so-called “ghost-signal”. The user then pulls the trigger to “capture” the ghost. The whole rig is built inside a flashlight which presented a useful form factor for modification.
For those eager to dive into the nitty-gritty, [Jules] has shared the project files on GitHub. There’s some nifty stuff going on, like Rust code that interfaces with I2C devices hooked up to the Pi, and a sensor-fusion algorithm to make the most out of the data from the 9-axis IMU.
It’s a fun build that probably taught [Jules] a great deal along the way, even if it’s a game at heart. If you prefer to shoot zombies instead of capture ghosts, we’ve seen a build that lets you go hunting with a laser crossbow, too.
Continue reading “The Ghost Detector 9000 Is A Fun Spirit-Chasing Game”