The fiftieth anniversary of the Apollo 11 mission – the flight that first took man to the surface of the moon — is coming up. By the time this post is published, some YouTube channel will invariably be running a real-time-but-delayed-fifty-years live stream of all the mission events, culminating on the wee hours of July 20th where we wait hours for someone to figure out how to open the door.
[CuriousMarc] and space hardware collector [Jimmie Loocke] have a different type of anniversary in mind. They have an Apollo Guidance Computer sitting on a bed in a motel room, and they’re going to get it up and running by July 20th. That’s the plan, at least. This is no easy feat: the Apollo Guidance Computer looks like two 19-inch, 1U rack units, with no standardized connectors to talk to any other hardware. They’ve just figured out the hardest part of this build by making their own NASA-spec contacts. They can now connect external hardware to the AGC, probably for the first time in decades.
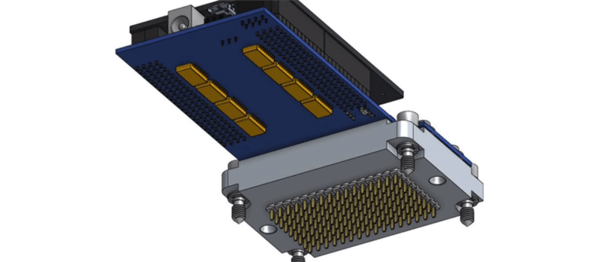
As it stands now, there are external ports on the gigantic bricks of aluminum enclosure that comprise the two AGC modules. These ports are just female pin headers, completely unlike any standard that can be found today. However, the folks at Samtec managed to build the male versions of these pin headers for this project. These pins fit the female sockets on one end, and are standard, square-shaped wire wrapped headers on the other. They are mounted in a milled plastic block, and after everything is wired up, [Marc] and [Jimmie] had a direct electrical connection to the Apollo Guidance Computer. The machine lives again.
There’s still a lot of work to do to get these bricks of computer up and running for the 20th, but this is fantastic progress. Already they’re single-stepping the AGC and running the P63 program that landed on the moon. Check out the video below.
Continue reading “Manufacturing New Connectors For The Apollo Guidance Computer”