If you’ve ever cast your eyes towards experimenting with microwave frequencies it’s likely that one of your first ports of call was a cheaply-available Doppler radar module. These devices usually operate in the 10 GHz band, and the older ones used a pair of die-cast waveguide cavities while the newer ones use a dielectric resonator and oscillator on a PCB. If you have made your own then you are part of a very select group indeed, as is [Reed Foster] and his two friends who made a Doppler radar module their final project for MIT’s 6.013 Applications of Electromagnetics course.
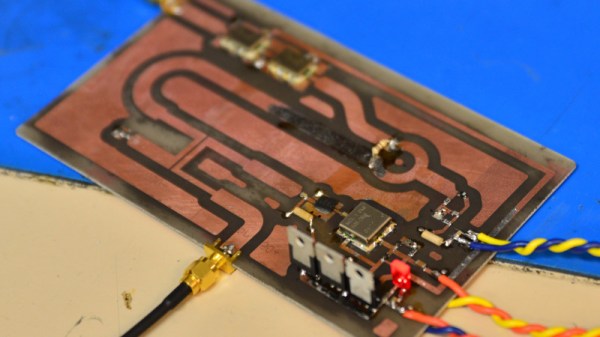
Their module runs at 2.4 GHz and makes extensive use of the notoriously dark art of PCB striplines, and their write-up offers a fascinating glimpse into the world of this type of design. We see their coupler and mixer prototypes before they combined all parts of the system into a single PCB, and we follow their minor disasters as their original aim of a frequency modulated CW radar is downgraded to a Doppler design. If you’ve never worked with this type of circuitry before than it makes for an interesting read.
We’ve shown you a variety of commercial Doppler modules over the years, of which this teardown is a representative example.