Lithium-ion batteries make possible smaller and lighter electronics. Unfortunately, they are also costly to produce. In a conventional lithium-ion battery, many thin layers create the finished product much like filo dough in baklava. A startup company called 24M thinks they have the answer to making less expensive lithium-ion batteries: a semisolid electrode made by mixing powders and liquid to form an electrolyte goo.
Not only will the batteries be cheaper and faster to create, but the cost of the factory will be less. Currently, 24M has a pilot manufacturing line, but by 2020 they expect to scale to produce batteries that cost less than $100 per kilowatt hour (today’s costs are about $200 to $250 for conventional batteries). Under $100, the batteries become competitive with the cost of internal combustion engines, according to the article.
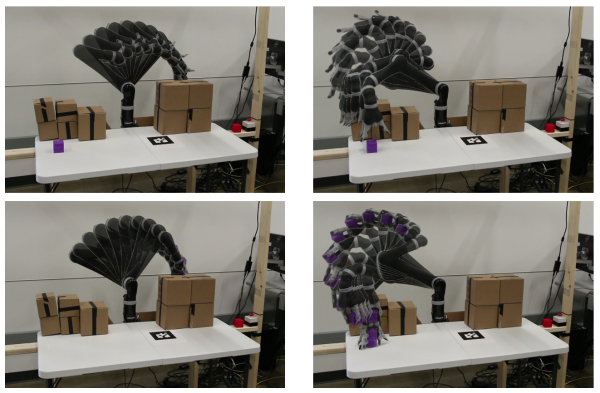
For humans, moving our arms and hands onto an object to pick it up is pretty easy; but for manipulators, it’s a different story. Once we’ve found the object we want our robot to pick up, we still need to plan a path from our robot hand to the object all the while lugging the remaining limbs along for the ride without snagging them on any incoming obstacles. The space of all possible joint configurations is called the “joint configuration space.” Planning a collision-free path through them is called path planning, and it’s a tricky one to solve quickly in the world of robotics.
These days, roboticists have nailed out a few algorithms, but executing them takes 100s of milliseconds to compute. The result? Robots spend most of their time “thinking” about moving, rather than executing the actual move.
Robots have been lurching along pretty slowly for a while until recently when researchers at Duke University [PDF] pushed much of the computation to hardware on an FPGA. The result? Path planning in hardware with a 6-degree-of-freedom arm takes under a millisecond to compute!
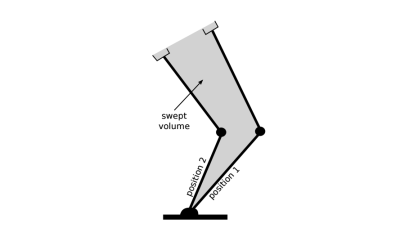
It’s worth asking: why is this problem so hard? How did hardware make it faster? There’s a few layers here, but it’s worth investigating the big ones. Planning a path from point A to point B usually happens probabilistically (randomly iterating to the finishing point), and if there exists a path, the algorithm will find it. The issue, however, arises when we need to lug our remaining limbs through the space to reach that object. This feature is called the swept volume, and it’s the entire shape that our ‘bot limbs envelope while getting from A to B. This is not just a collision-free path for the hand, but for the entire set of joints.
Image Credit: Robot Motion Planning on a Chip
Encoding a map on a computer is done by discretizing the space into a sufficient resolution of 3D voxels. If a voxel is occupied by an obstacle, it gets one state. If it’s not occupied, it gets another. To compute whether or not a path is OK, a set of voxels that represent the swept volume needs to be compared against the voxels that represent the environment. Here’s where the FPGA kicks in with the speed bump. With the hardware implementation, voxel occupation is encoded in bits, and the entire volume calculation is done in parallel. Nifty to have custom hardware for this, right?
We applaud the folks at Duke University for getting this up-and-running, and we can’t wait to see custom “robot path-planning chips” hit the market some day. For now, though, if you’d like to sink your teeth into seeing how FPGAs can parallelize conventional algorithms, check out our linear-time sorting feature from a few months back.
Omnidirectional wheels are one of the hardy perennials of the world of invention. There seems to be something about the prospect of effortless parallel parking that sets the creative juices of backyard inventors flowing, and the result over the years have been a succession of impressively engineered ways to move a car sideways.
The latest one to come our way is courtesy of Canadian inventor [William Liddiard], and it is worthy of a second look because it does not come with some of the mechanical complexity associated with other omnidirectional wheel designs. [Liddiard]’s design uses a one-piece tyre in the form of a flexible torus with a set of rollers inside it which sits on a wheel fitted with a set of motorised rollers around its circumference. The entire tyre can be rotated round its toroidal axis, resulting in a tread which can move sideways with respect to the wheel.
The entire process is demonstrated in a video which is shown below the break, and the small Toyota used as a demonstration vehicle can move sideways and spin with ease. We would be wary of using these wheels on a road car until they can be demonstrated to match a traditional tyre in terms of sideways stability when they are not in their omnidirectional mode, but we can instantly see that they would be a significant help to operators of industrial machines such as forklifts in confined spaces.
Back in the day, stoners were content to sit around, toke on a joint, mellow out, and listen to the Grateful Dead or something. Nowadays, they practically need a degree in electrical engineering just to get high. [Beiherhund] sent us his VapeBox build. Like so many projects on Hackaday, we’re not going to make one ourselves, but we appreciate a well-done project.
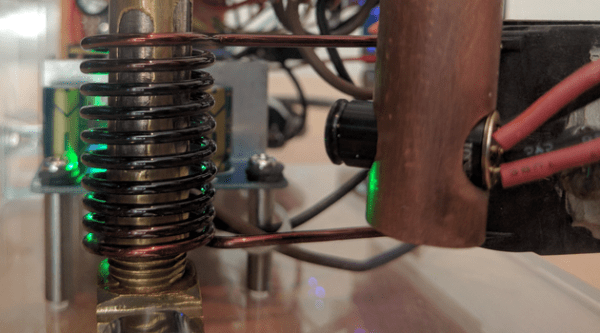
First off, there’s a home-built induction heater. A 30A current sensor and switch-mode power supply regulate the amount of juice going to the coil that surrounds the heating chamber. [Beiherhund] discovered that brass doesn’t have enough internal resistance to heat up in an induction heater, so he built a stainless steel insert into the chamber. Optimal temperature is monitored from outside the chamber by a MLX90614 IR thermometer.
Fans, controlled by PWM, keep the box cool. Lights, an LCD, an HC-05 Bluetooth unit, and everything else are all tied to the obligatory Arduino that serves as the brains. A cell-phone application lets [Beiherhund] control all the functions remotely. (We’re guessing, just because he could.) It’s wrapped up in a nice acrylic case. The video, embedded below, starts with real details at 4:28.
Before you loyal Hackaday commenteers get on your high horses (tee-hee!) bear in mind that smoking dope is legal in a number of states in the USA, and that Hackaday has an international readership. We don’t encourage drug abuse or soldering in shorts and flip-flops.
Go into a fancy drug store, and you might just find one of the most amazing sales demonstrations you’ll ever see. Step right up, take your shoes off, and place your feet onto the magical Dr. Scholl’s machine, and you’ll get a customized readout of how your feet touch the ground. As an added bonus, you’ll also get a recommendation for a shoe insert that will make your feet feel better and your shoes fit better.
There is, of course, one problem with this setup. You don’t stand on a footprint measuring device all day. A better solution to the problem of measuring how your feet hit the ground is doing it while you walk. That’s where [chiprobot]’s Alli-Gait-Or Analysis comes in. It’s that Dr. Scholl’s machine tucked into the sole of a shoe. It can be worn while you walk, and it can tell you exactly how your feet work.
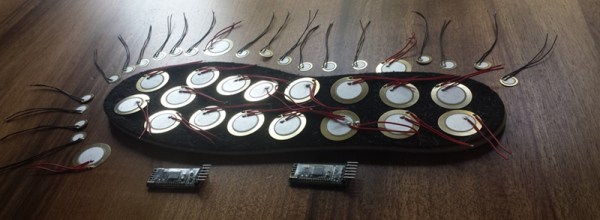
[chiprobot]’s robotic shoes consist of a 3D printed insert that holds eighteen piezo transducers per shoe. These are connected to ADCs, which feed into a microcontroller which sends the data out to a computer. That’s simple enough, but making sense of the data is the real problem.
To turn this data into something that could be used for selecting orthotics or simply finding a better shoe, [chiprobot] is plugging this data into Blender and creating some very cool visualizations. It’s good enough to get some serious data off a shoe, and since this Alli-Gait-Or is wearable, the data is much more valid than a machine sitting in a drug store.
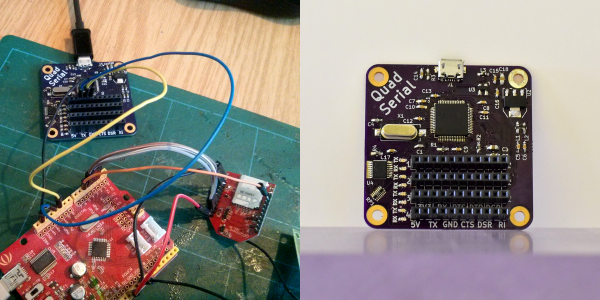
Despite concerted efforts to kill them, serial ports are alive and well, especially in embedded system. True, most of them end in a USB port, these days, but there’s still a lot of gear with a DE-9 (it isn’t a DB-9, despite the common use of the word) or a TTL-serial port lurking around. [James Fowkes] got tired of managing a bunch of USB to serial adapters, so he decided to build his own FT4232 breakout board that would provide four serial ports from a USB connection.
The small board has transmit and receive LEDs for each port along with EMI and ESD protection on the USB port. The ports are all TTL serial, serving the modern hacker, and the 3.3V pins are 5V tolerant.
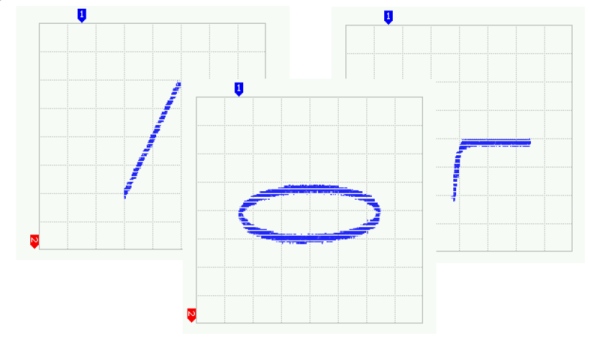
[Jason Jones] has always wanted a curve tracer for his home shop. When he was starting out in electronics he fell in love with a machine called a Huntron Tracker 2000. This machine would feed a sine wave into a circuit on one side and plot a XY graph on the other.
[Jason] figured that with a modern microcontroller such a device could be build simply and cheaply for around $15 dollars. With that requirement in mind he set out to build it. He selected a PIC24F16KM202 for the brain and got to work.
The write-up is really great. It’s rare that someone puts every step of their development and design thinking into writing. Some have argued that this is the only true way to have an OSHW hardware project. The series covers everything from the initial requirements and parts selection to the software development and eventual testing of the device.
[Jason] managed to build a pretty capable little curve tracer in the end. We really enjoyed it when he used the tracer to debug the tracer.