 Many motors offer a quadrature encoder that give feedback on whether, and in which direction, the motor shaft is moving. But if you’re clever about analyzing the data you can use a quadrature encoder to estimate motor velocity. [Jason Sachs] makes the case that it’s fairly easy to get this wrong. Lucky for us he has carefully laid out his process of extrapolating velocity from the two edge-trigger data sources.
Many motors offer a quadrature encoder that give feedback on whether, and in which direction, the motor shaft is moving. But if you’re clever about analyzing the data you can use a quadrature encoder to estimate motor velocity. [Jason Sachs] makes the case that it’s fairly easy to get this wrong. Lucky for us he has carefully laid out his process of extrapolating velocity from the two edge-trigger data sources.
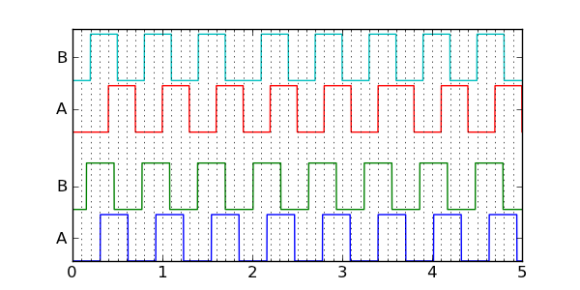
The process starts with reading from the encoder. Many chips have peripherals that will interface with a rotary encoder, but hardware lacking that built-in helper can still be used by monitoring pin-change interrupts. Once connected samples are taken over time and the rest is left to the quality of your algorithm.
What can this velocity data be used for? That’s up to you. But we can think of a couple of projects. It may be useful in a spinning POV display like this FPGA-based beauty. You also find quadrature encoders in exercise equipment. Knowing the velocity will help if you’re building your own computer to replace what came with that Stairmaster.
[via Reddit]