The House of Mouse has been at the forefront of entertainment technology from its very beginnings in an old orange grove in Anaheim. Disney Imagineers invented the first modern animatronics in the 1960s and they’ve been improving the technology ever since, often to the point of being creepy.
But the complicated guts of an animatronic are sometimes too much for smaller characters, so in the spirit of “cheaper, faster, better”, Disney has developed some interesting techniques for animated characters made from wire. Anyone who has ever played with a [Gumby] or other posable wireframe toys knows that eventually, the wire will break, and even before then will plastically deform so it can’t return to its native state.
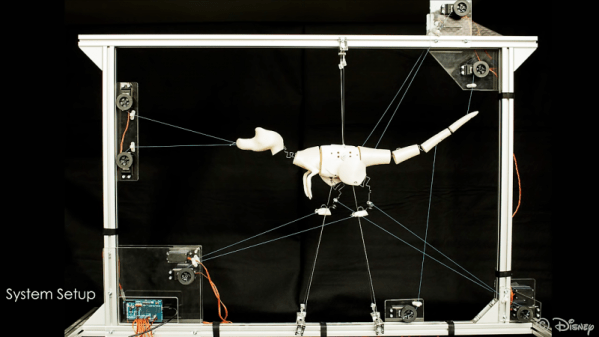
Wires used as the skeletons of animated figures can avoid that fate if they are preloaded with special shapes, or “templates,” that redirect the forces of bending. The Disney team came up with a computational model to predict which template shapes could be added to each wire to make it bend to fit the animation needs without deforming. A commercially available CNC wire bender installs the templates that lie in the plane of the wire, while coiled templates are added later with a spring-bending jig.
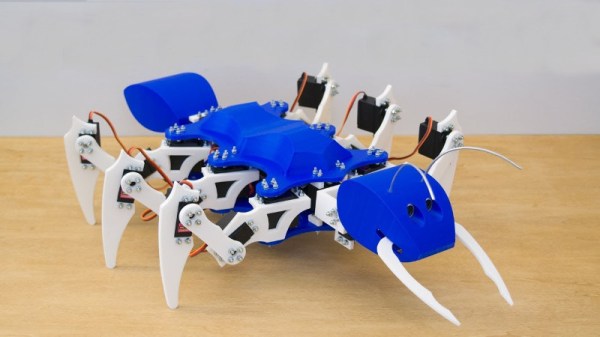
The results are impressive — the wire skeleton of an animated finger can bend completely back on itself with no deformation, and the legs of an animated ladybug can trace complicated paths and propel the beast with only servos pulling cables on the jointless legs. The video below shows the method and the animated figures; we can imagine that figures animated using this technique will start popping up at Disney properties eventually.
From keeping guests safe from robotic harm to free-flying robotic aerialists, it seems like the Disney Imagineers have a hardware hacker’s paradise at the Happiest Place on Earth.
Continue reading “Kinetic Wire Animatronics Bend It Like Disney”

 What would reality have to look like before a robot should be given legal status similar to that of a human? For that, we can look to fiction.
What would reality have to look like before a robot should be given legal status similar to that of a human? For that, we can look to fiction.