When we think of pneumatic actuators, we typically consider the standard varieties of pneumatic cylinder, capable of linear motion. These can be referred to as “hard” actuators, made of rigid components and capable of great accuracy and force delivery. However, “soft” actuators have their own complementary abilities – such as being able to handle more delicate tasks and being less likely to injure human operators when used in collaborative operations. The Whitesides Research Group at Harvard University has undertaken significant research in this field, and released a paper covering a novel type of soft pneumatic actuator.
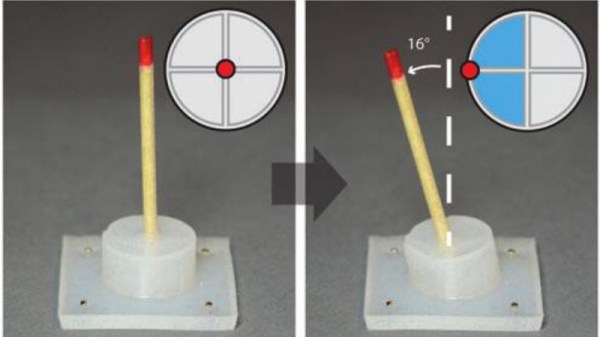
The actuator consists of a series of soft, flexible sealed chambers which surround a wooden dowel in the center. By applying vacuum to these various chambers, the dowel in the center can be pulled into up to eight different positions. It’s a unique concept, and one we can imagine could have applications in various material processing scenarios.
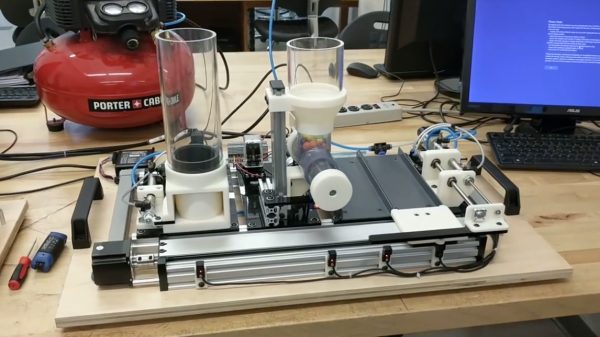
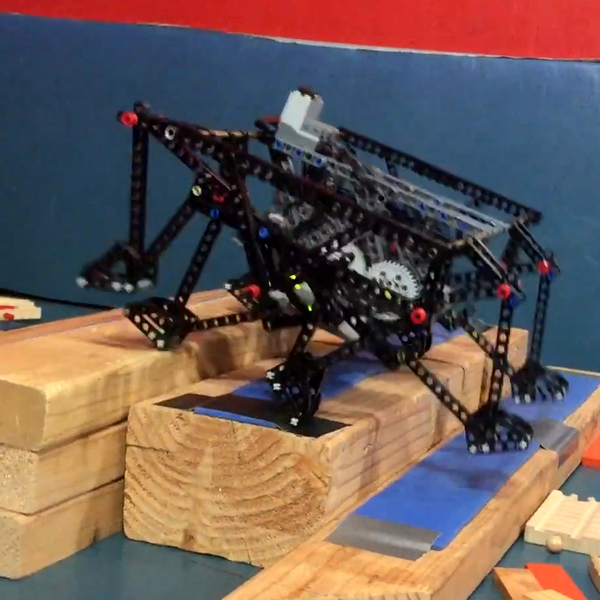
The actuator was built by moulding elastomers around 3D printed components, so this is a build that could theoretically be tackled by the DIYer. The paper goes into great detail to quantify the performance of the actuator, and workshops several potential applications. Testing is done on a fluid delivery and stirring system, and a tethered robotic walker was built. The team uses the term cVAMS – cyclical vacuum actuated machine – to describe the actuator technology.
The world of soft robotics is a hot bed of development, and we look forward to further work in this field. It’s not just Harvard, either – we’ve seen interesting work from Yale and from the Hackaday community too!