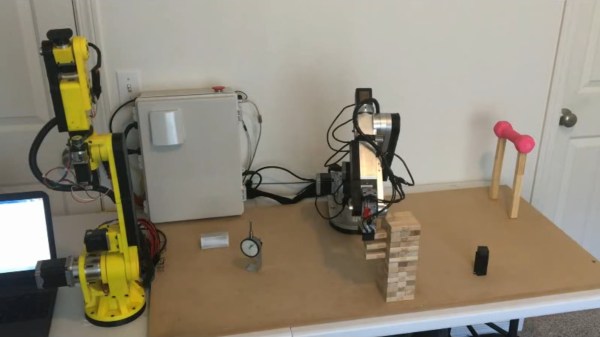
We’ve seen industrial robotic arms in real life. We’ve seen them in classrooms and factories. Before today, we’ve never mistaken a homemade robotic arm for one of the price-of-a-new-home robotic arms. Today, [Chris Annin] made us look twice when we watched the video of his six-axis robotic arm. Most of the DIY arms have a personal flare from their creator so we have to assume [Chris Annin] is either a robot himself or he intended to build a very clean-looking arm when he started.
He puts it through its paces in the video, available after the break, by starting with some stretches, weight-lifting, then following it up and a game of Jenga. After a hard day, we see the arm helping in the kitchen and even cracking open a cold one. At the ten-minute mark, [Chris Annin] walks us through the major components and talks about where to find many, many more details about the arm.
Many of the robotic arms on Hackaday are here by virtue of resourcefulness, creativity or unusual implementation but this one is here because of its similarity to the big boys.
Continue reading “Robotic Arm Rivals Industrial Counterparts”