[Techmaster], like probably a lot of us, was hugely inspired by the engineering wonder that is the Iron Man suit. So, like any good maker, he decided to build his own. [Techmaster’s] social media pages are filled with promotional videos that are sure to get you excited for your next Comic-Con (when you can go in-person of course).
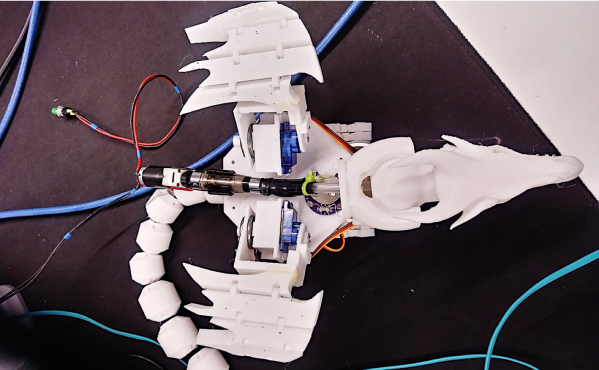
It’s difficult to summarize all the work [Techmaster] has put into his suit in a single post, so we’ll let his social media pages do the talking. From the knuckle launcher to the repulsor and the beloved Arc rector, [Techmaster] is really putting together an impressive set. Now, we’ve seen our fair share of Iron Man-inspired projects here on Hackaday, but [Techmaster’s] designs might be the closest attempt to a full suit with the projectiles to match.
[Techmaster’s] goal is to develop the most realistic Iron Man suit ever, well..other than the original we suppose. Given the dynamic nature of his development process, there aren’t any DIY instructions for the rest of us to follow as of yet (though he does host live streams), so you’ll have to piece together design ideas from his promotional videos.
[Techmaster] might be living the dream a lot of us wish were our realities and we certainly can’t wait to see an official version 1 release. Feel free to support his development if you feel so inclined.