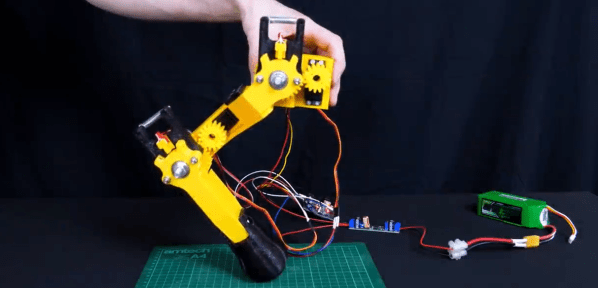
Walking robots that move smoothly are tricky to build and usually involve some sort of compliant leg mechanism — a robot limb that can rebound like natural physiology for much better movement than what a stiff machine can accomplish. In his everlasting quest to build a real working robot dog, [James Bruton] is working on an affordable and accessible Mini Robot Dog, starting with the compliant leg mechanism.
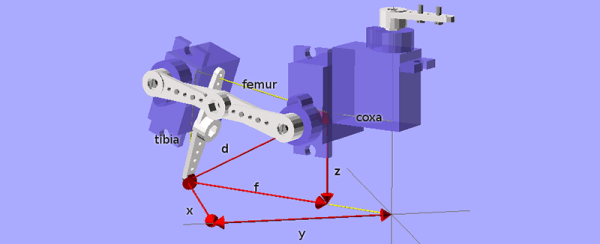
 The 3D printed leg mechanism has two joints (hip and knee), with an RC servo to drive each. To make the joints compliant, both are spring-loaded to absorb external forces, and the deflection is sensed by a hall effect sensor with moving magnets on each side. Using the inputs from the hall effect sensor, the servo can follow the deflection and return to its original position smoothly after the force dissipates. This is a simple technique but it shows a lot of promise. See the video after the break.
The 3D printed leg mechanism has two joints (hip and knee), with an RC servo to drive each. To make the joints compliant, both are spring-loaded to absorb external forces, and the deflection is sensed by a hall effect sensor with moving magnets on each side. Using the inputs from the hall effect sensor, the servo can follow the deflection and return to its original position smoothly after the force dissipates. This is a simple technique but it shows a lot of promise. See the video after the break.
A project can sometimes develop a life of its own, or in the case of [James]’s OpenDog, spawn experimentally evolving offspring. This is number four, and it’s designed to be a platform for learning how to make a quadruped walk properly, and to be simple and cheap enough for others to build. We’re looking forward to seeing how it turns out.
If you missed it, also check out this robot’s weird sibling, self-balancing Sonic.