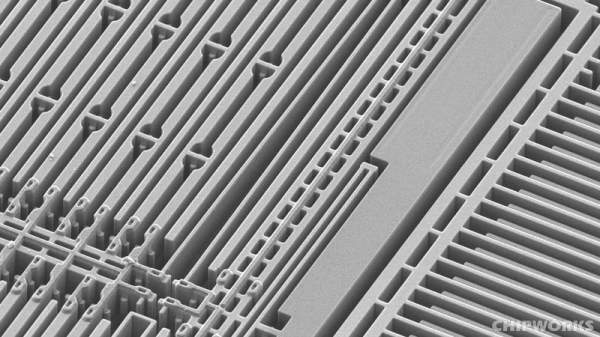
What’s tiny and on track to be worth $22 billion dollars by 2018? MEMS (Micro Electrical Mechanical Systems). That’s a catch-all phrase for microscopic devices that have moving parts. Usually, the component sizes range from 0.1 mm to 0.001 mm, which is tiny, indeed. There are some researchers working with even smaller components, sometimes referenced as NEMS (Nano Electrical Mechanical Systems).
Resonant Cantilever by [Pcflet01], CC BY-SA 3.0MEMS have a wide range of applications including ink jet printers, accelerometers, gyroscopes, microphones, pressure sensors, displays, and more. Many of the sensors in a typical cell phone would not be possible without MEMS. There are many ways that MEMS devices are built, but just to get a flavor, consider the cantilever (see right), one of the most common MEMS constructions.
Surely a blown light bulb can’t kill a microwave oven, right? You might not expect it to, but that was indeed the root cause of a problem that [mikeselecticstuff] recently investigated; the cascade of failures is instructive to say the least.
While the microwave that made its way to [mike]’s bench wasn’t exactly engineered to fail, it surely was not designed to succeed. We won’t spoil the surprise, but suffice it to say that his hopes for a quick repair after the owner reported a bang before it died were dashed by an arc across the interior light bulb that put a pulse of mains voltage in places it didn’t belong. That the cascade of failures killed the appliance is a testament to how designing to a price point limits how thoroughly devices can be tested before production runs in the millions are stuffed into containers for trips to overseas markets.
Even though [mike] made his best effort to adhere to the Repair Manifesto, the end result was a scrapped microwave. It wasn’t a total loss given the interesting parts inside, but a disappointment nonetheless unless it forces us to keep in mind edge-case failure modes in our designs.
Highly polished all-in-one gear for teaching STEM is one way to approach the problem. But for some, they can be intimidating and the up-front expenditure can be a barrier to just trying something before you’re certain you want to commit. [Miranda] is taking a different approach with the aim of making engineering education possible with junk you have around the house. The point is to play around with engineering concepts with having to worry about doing it exactly right, or with exactly the right materials. You know… hacking!
Ben Einstein, a product designer and founder at Bolt, a hardware-based VC, recently got his hands on a Juicero press. This desktop juice press that only works with proprietary pouches filled with chopped fruits and vegetables is currently bandied in the tech press as evidence Silicon Valley has gone mad, there is no future in building hardware, and the Internet of Things is a pox on civilization. Hey, at least they got the last one right.
This iFixit-style tear down digs into the Juicero mixer in all its gory details. It’s beautiful, it’s a marvel of technology, and given the engineering that went into this machine, it was doomed to fail. Not because it didn’t accomplish the task at hand, but because it does so with a level of engineering overkill that’s delightful to look at but devastating to the production cost.
[Alan Yates] is a hacker’s engineer. His job at Valve has been to help them figure out the hardware that makes virtual reality (VR) a real reality. And he invented a device that’s clever enough that it really should work, but difficult enough that it wasn’t straightforward how to make it work.
In his presentation at the Hackaday Supercon 2016, he walked us through all of the design and engineering challenges that were eventually conquered in getting the Lighthouse to market. We’re still a bit overwhelmed by the conceptual elegance of the device, so it’s nice to have the behind-the-scenes details as well.
Every once in a while, we stumble on an amazing resource that’s not exactly new, but it’s new to us. This is the case, in spades, with The Engines of Our Ingenuity, a radio show that’s been running since 1988!
Each episode covers an invention or engineering marvel, and tells the story of how it came to be, and puts each device into its historical and cultural context. Want to get the lowdown on how we safely bring fire into the kitchen? Or the largest land transport vehicle, NASA’s crawler? And what’s up with lobsters anyway?
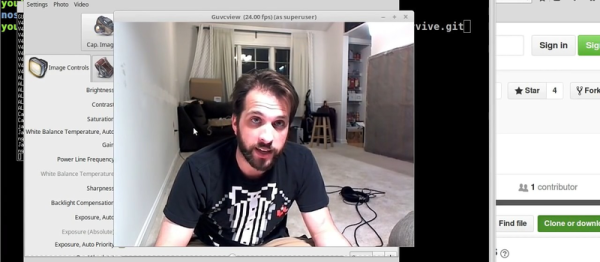
[CNLohr] needs no introduction around these parts. He’s pulled off a few really epic hacks. Recently, he’s set his sights on writing a simple, easy to extend library to work with the HTC Vive VR controller equipment, and in particular the Watchman controller.
There’s been a lot of previous work on the device, so [Charles] wasn’t starting from scratch, and he live-streamed his work, allowing others to play along. In the process, two engineers who actually worked on the hardware in question, [Alan Yates] and [Ben Jackson], stopped by and gave some oblique hints and “warmer-cooler” guidance. A much-condensed version is up on YouTube (and embedded below). In the links, you’ll find code and the live streams in their original glory, if you want to see what went down blow by blow. Code and more docs are in this Gist.