We love a little outside-the-box thinking around here, and anytime we see robots that don’t use wheels and motors to do the moving, we take notice. So when a project touting robotic fish using soft-actuator fins crossed the tip line, we had to take a look.
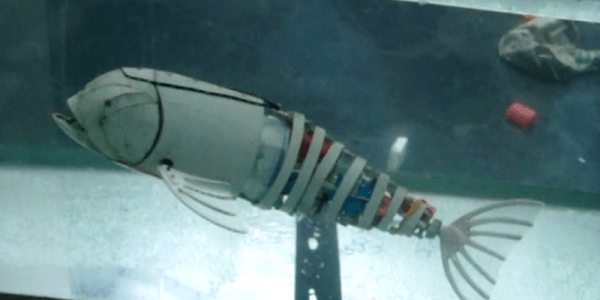
It turns out that this robofish comes from the fertile mind of [Carl Bugeja], whose PCB motors and flexible actuators have been covered here before. The basic concept of these fish fins is derived from the latter project, which uses coils printed onto both sides of a flexible Kapton substrate. Positioned near a magnet, the actuators bend when a current runs through them. The video below shows two prototype robofish, each with four fins. The first is a scrap of foam with a magnet embedded; the fins did flap but the whole thing just weighed too much. Version two was much lighter and almost worked, but the tether to the driver is just too stiff to allow it to really flex its fins.
It looks like it has promise though, and we’re excited to see where [Carl] take this. Perhaps schools of tiny robofish patrolling for pollution?
Continue reading “Flexible PCBs Make The Fins Of This Robotic Fish”