Six tiny gears, a few fancy pins, and some clever casting are what it takes to build this tiny orrery. And patience — a lot of patience, too.
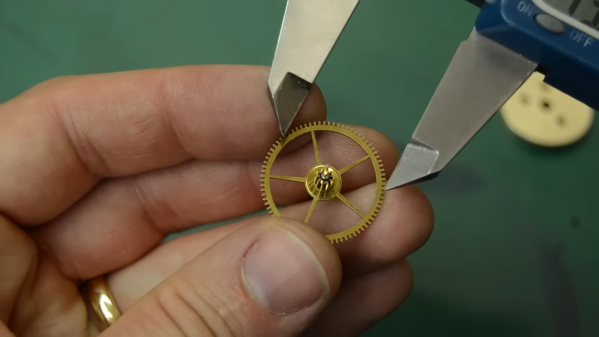
As model solar systems go, this one is exceptionally small. Its maker, [Mike] from Chronova Engineering, says it measures about 20 mm across and qualifies as the smallest orrery around. We can’t officiate that claim, but we’re not going to argue with it either. It’s limited to the Sun-Earth-Moon system, and while not as complete as some other models we’ve seen, it’s still exquisitely detailed. The gears that keep the Moon rotating 12.4 times around the Earth for each rotation of our home planet around the Sun are tiny, and take an abundance of watchmaking skill to pull off.
The video below shows the whole process, which is absolutely entrancing to watch. There are some neat tricks on display, from milling out the arms of the main wheel using a powered tailstock spindle to casting the Sun from resin in a silicone mold. The final model, with the model Earth and Moon spinning around the Sun on delicate brass wheels, is a visual treat.
We’ve seen some interesting stuff from Chronova Engineering lately, including this bimetallic tea timer.
Continue reading “Tiny Orrery Is A Watchmaker’s Tour De Force”