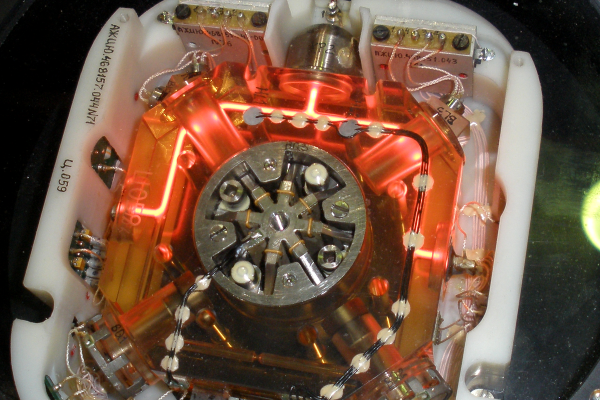
Recently [Michel] received two packages from Ukraine containing some salvaged Russian electronics that once belonged to (presumably) a 9K38 Igla, Vympel R-27 or similar infrared homing missile, as well as a Fiber Optic Gyroscope (FOG) from an unknown missile, though possibly from the Tornado family of MRLSes. The latter uses the Sagnac effect to detect the phase shift between two laser beams being injected into the same fiber when the fiber, and thus the device, are rotating. The advantage of such a gyroscope is that it is effectively solid-state, requiring only some optical components, amplifier stage and as shown here an Altera Cyclone II FPGA to integrate the results.
The 16-channel linear infrared array sensor is more basic, with a matching amplification channel for each optical receiver element, which are fed into a multiplexer IC in a rather remarkable looking ceramic-gold packaged DIP format, with what looks like a 2004 date code (‘0424’). Although both are rather damaged, [Michel] figures that he might be able to restore the FOG to working condition, assuming no crucial and irreplaceable parts are missing. As useful as FOGs are in missiles, they also have countless uses outside of military applications.