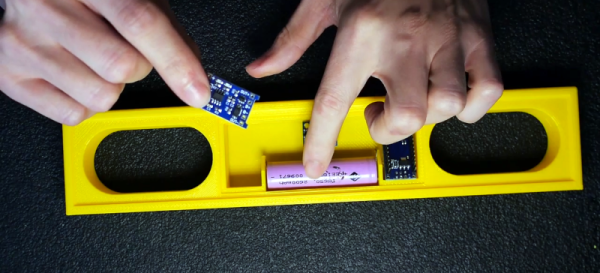
A spirit level, you know the kind of level with a little bubble in a tube of fluid, is a basic construction tool. [DesignBuildDestroy] took an Arduino, a gyroscope chip, and an OLED, and made a 3D printed level with no bubble, but it does have a nice digital display.
It is funny when you realize that at one time a gyroscope was a high tech item reserved for missiles and aircraft. Now you can grab a six-axis sensor for pennies. Even, better, the code used in the project can offload the Arduino for a lot of processing.
Some of us are suckers for new hardware. There’s absolutely nothing shameful about a drawer overflowing with gamepads, roll-up keyboards, and those funny-shaped ergonomic mice. MyTeleTouch won’t sate your itch for new hardware because [Dimitar Danailov] didn’t design hardware you hold, because it uses your phone as a catch-all Human Interface Device, HID. A dongle plugs into a standard USB port, and your Android phone can emulate a USB keyboard, mouse, or gamepad over Bluetooth.
Chances are high that you already set up your primary computer with your favorite hardware, but we think we’ve found a practical slant for a minimalist accessory. Remember the last time you booted an obsolete Windows desktop and dug out an old mouse with a questionable USB plug? How long have you poked around the bottom of a moving box trying to find a proprietary wireless keyboard dongle, when you just wanted to type a password on your smart TV? What about RetroPi and a game controller? MyTeleTouch isn’t going to transform your daily experience, but it’ll be there when you don’t want to carry a full-size keyboard down three flights of stairs to press {ENTER} on a machine that spontaneously forgot it has a touch screen. If you don’t have opportunities to play the hero very often, you can choose to play the villain. Hide this in a coworker’s USB port, and while they think you’re sending a text message, you could be fiddling with their cursor.
We enjoy a good prank that everyone can laugh off, and we love little keyboards and this one raises the (space) bar.
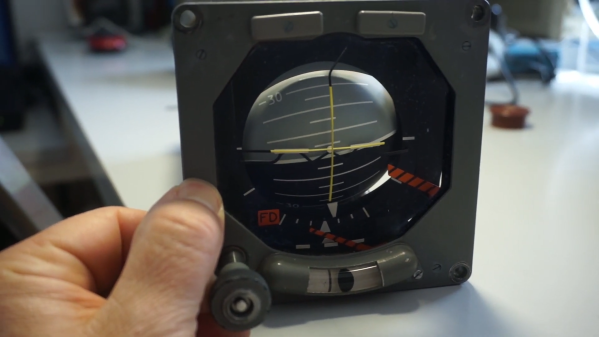
Aviation instruments are highly interesting pieces of engineering, and it is quite satisfying to watch the often over-engineered mechanisms behind them. If you are into that sort of thing it is worthwhile to check out [Erik Baigar]’s video where he explains the working principle of the attitude indicator from a Tornado jet.
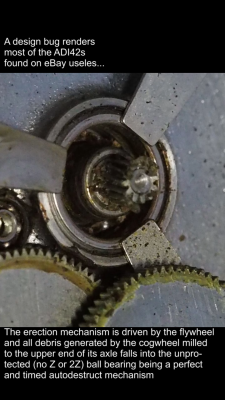
The attitude indicator or artificial horizon of an airplane is one of the most important instruments, especially during poor sight. The ADI42-124 used in the Tornado jet is completely standalone and only needs a DC power supply which is why [Erik Baigar] can show it off while standing on his balcony. At the heart of this instrument is a gyroscope which consists of a spinning disc attached to a gimbal mount. Due to the conservation of angular momentum, the spin axis will always keep its orientation when the instrument is rotated. However, mechanical gyroscopes tend to drift over time and therefore include a mechanism to keep the spin axis upright with respect to the direction of gravity. The ADI42-124 uses an entirely mechanical mechanism for this based on free swiveling weights. Forget everything we said earlier about overengineering as [Erik Baigar] also uncovers a fatal design flaw which leads to the instrument’s self-destruction as shown in the picture here. Unfortunately, this will render most of the units you can buy on eBay useless.
Be sure to check out [Erik Baigar]’s webpage which is nerd paradise for vintage computer and avionics fans or watch another gyroscope teardown.
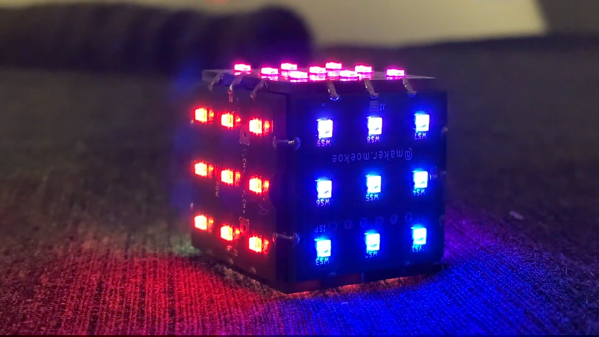
As cool as sculptural LED cubes are, the only thing you can really do is look at them. They’re not going to stand up to a lot of handling, and as tedious as it is to bend all those leads when building them, you probably wouldn’t want to mess with them anyway.
As you will see in the excellent build video that makes this build look challenging instead of impossible, the cube gets permanently sealed up with solder joints. Most but not all of these transfer power, ground, and data around the faces.
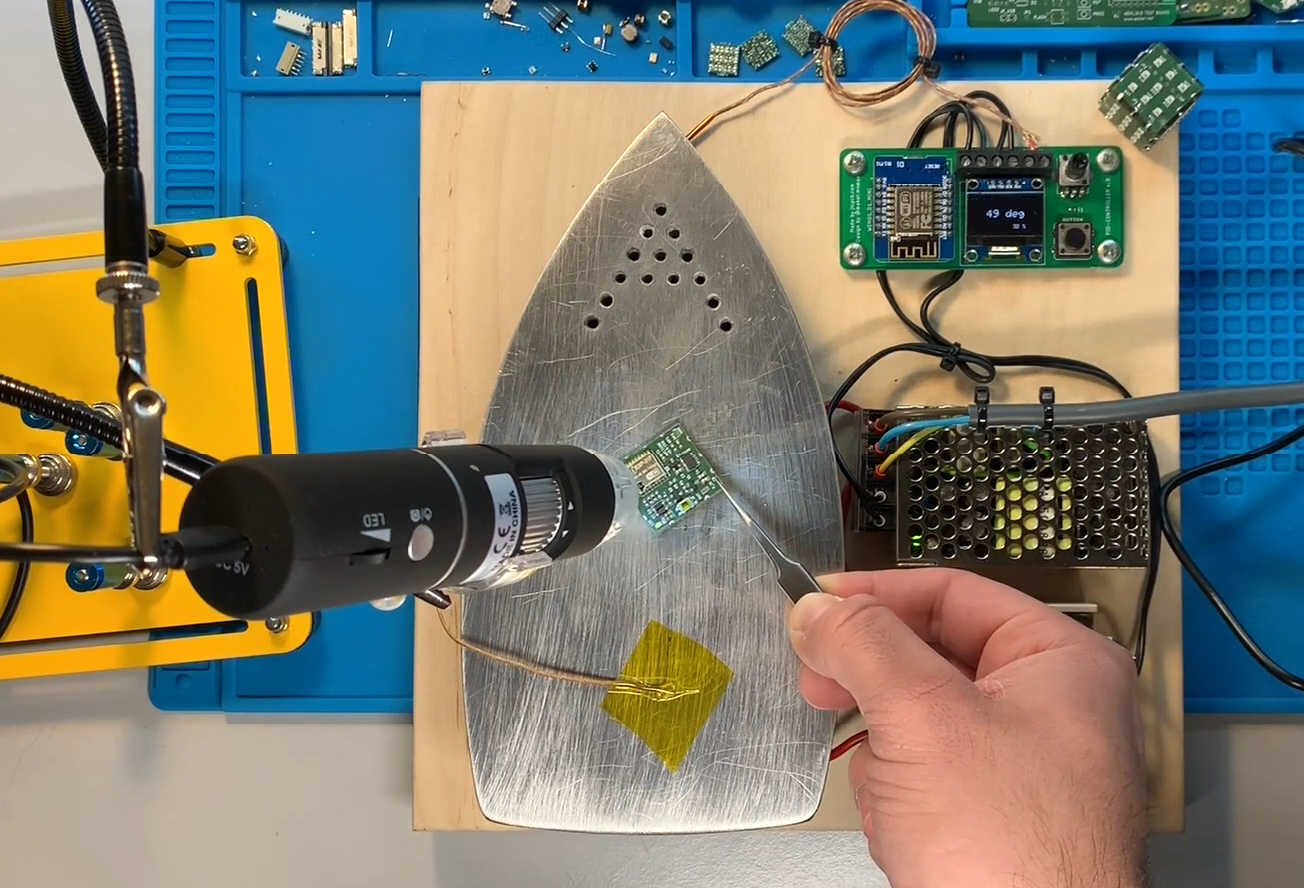
Once the cube is together, [moekoe] uses pogo pins to program it, and can charge the little LiPo inside through contact pads. We love the idea of using a cubical printed jig to help solder the PCB edges together, but not as much as we love [moekoe]’s home-brewed SMT soldering setup.
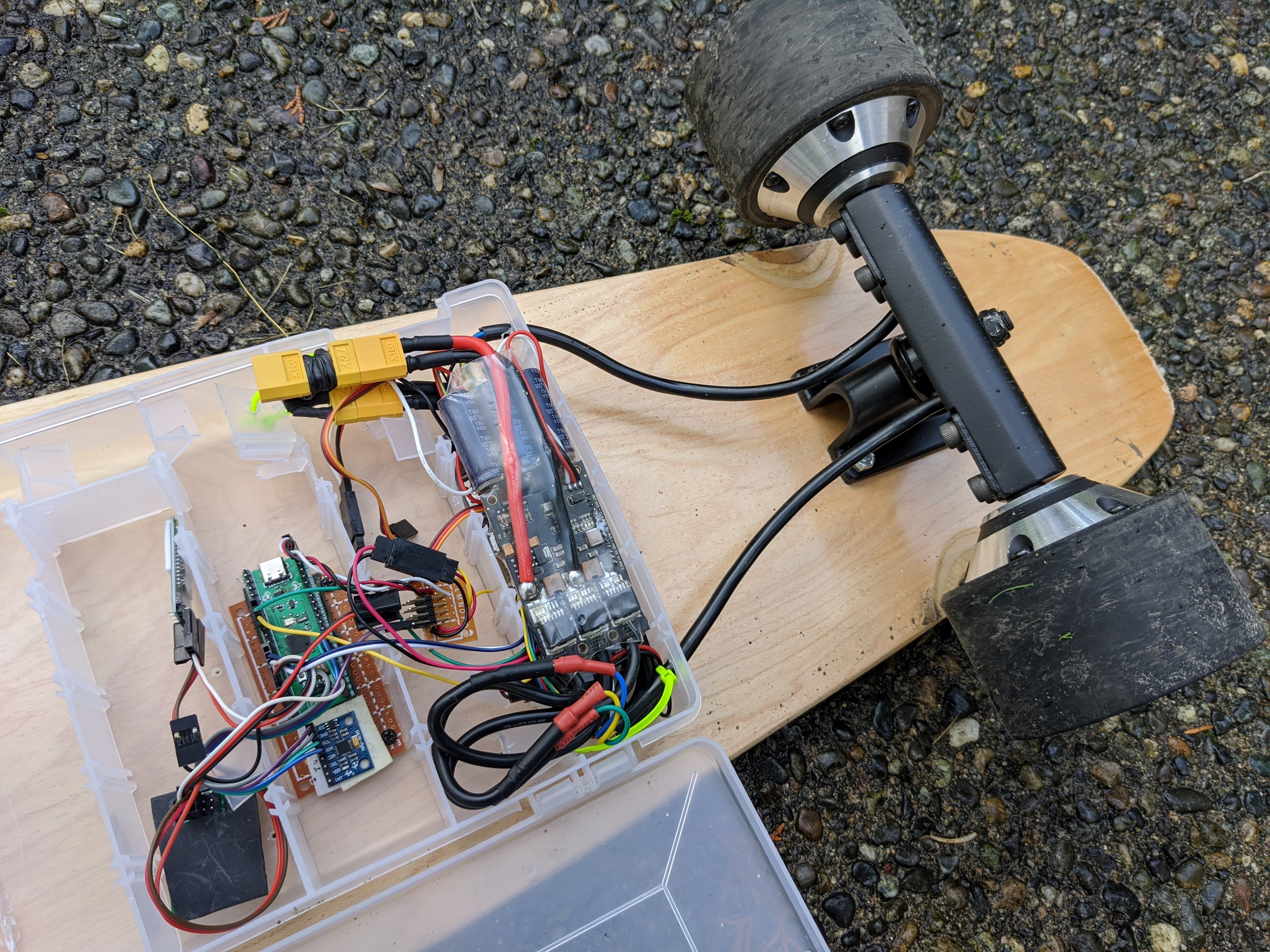
Using a bit of tech to make up for a lack of skill is a time-honoured tradition, otherwise known as cheating among those who acquired the skill the hard way. Learning to wheelie manual a skateboard is usually paid for in bruises, but [blezalex] got around that by letting his electric skateboard handle the balancing act.
At first glance the board looks and rides like an average DIY electric skateboard, with an off-the-shelf a dual hub motor truck, VESC speed controllers and a wireless throttle. The party trick appears when the front wheel is popped off the ground, which activates the secret self-balancing mode. At this point a STM32F401 dev board and MPU-6050 IMU take over control of the motors, which is in turn controlled by leaning forward or backwards, like a hoverboard. The remote throttle turns into a dead man switch, which cuts power to the motors when released.
[blezalex] says he has had less that an hour of skateboard time in his life before getting on this one, which is a good testament of just how well it works. The biggest challenge was in getting the board to turn while on two wheels, which was solved by sensing side-to-side tilt of the board with the IMU and applying proportional differential torque to the wheels. With a bit of practice it’s also possible to smoothly shift between riding modes while moving.
We think this is a really elegant cheat, now we need to build one of our own. Fortunately the STM32 firmware and instructions are all up on GitHub. Building your own electric skateboard has become really simple with the availability of off-the-shelf components. We’ve also seen a bicycle with a wheelie cheat device to prevent you falling on your back
It’s no secret that the average smart phone today packs an abundance of gadgets fitting in your pocket, which could have easily filled a car trunk a few decades ago. We like to think about video cameras, music playing equipment, and maybe even telephones here, but let’s not ignore the amount of measurement equipment we also carry around in form of tiny sensors nowadays. How to use those sensors for educational purposes to teach physics is presented in [Sebastian Staacks]’ talk at 36C3 about the phyphox mobile lab app.
While accessing a mobile device’s sensor data is usually quite straightforwardly done through some API calls, the phyphox app is not only a shortcut to nicely graph all the available sensor data on the screen, it also exports the data for additional visualization and processing later on. An accompanying experiment editor allows to define custom experiments from data capture to analysis that are stored in an XML-based file format and possible to share through QR codes.
Aside from demonstrating the app itself, if you ever wondered how sensors like the accelerometer, magnetometer, or barometric pressure sensor inside your phone actually work, and which one of them you can use to detect toilet flushing on an airplane and measure elevator velocity, and how to verify your HDD spins correctly, you will enjoy the talk. If you just want a good base for playing around with sensor data yourself, it’s all open source and available on GitHub for both Android and iOS.
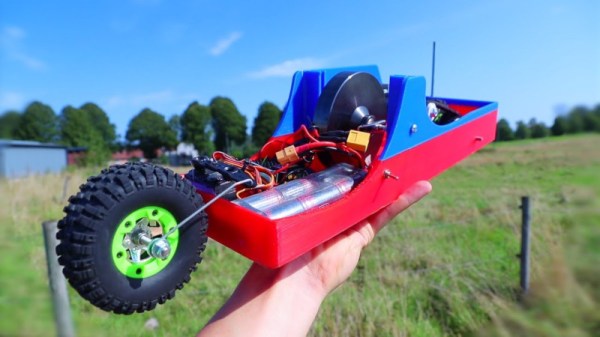
Your garden variety car generally comes with four wheels, plus a spare in the boot. It’s a number landed upon after much consideration, with few vehicles deviating from the norm. That doesn’t mean there aren’t other possibilities however, and [RCLifeOn] decided to experiment in just such a manner.
The result is a gyro-stabilized two-wheeled RC car, or as we might have put it, a motorcycle of sorts. A brushless motor drives the rear wheel, while steering up front is handled by a servo controlling the front wheel. A large spinning disc acts as a gyro in the center of the vehicle, and it’s all packaged in a simple 3D printed frame.
Results are impressive, with the gyro making a demonstrable difference to the vehicle’s performance. While it can be driven without the gyro enabled, it requires continual steering corrections to stay upright. With the gyro spun up, it rides much more like a bicycle, with few stability issues.