Surely, if you’re reading this website you’ve teased the thought of building your own 3D printer. I certainly did. But from my years of repeated rebuilds of my homebrew laser cutter, I learned one thing: machine design is hard, and parts cost money. Rather than jump the gun and start iterating on a few machine builds like I’ve done before, I thought I’d try to tease out the founding principles of what makes a rock-solid machine. Along the way, I discovered this book: Exact Constraint: Machine Design Using Kinematic Principles by Douglass L. Blanding.
This book is a casual but thorough introduction to the design of machines using the method of exact constraint. This methodology invites us to carefully assess how parts connect and move relative to each other. Rather than exclusively relying on precision parts, like linear guides or bearings, to limit a machine’s degrees of freedom, this book shows us a means of restricting degrees of freedom by looking at the basic kinematic connections between parts. By doing so, we can save ourselves cost by using precision rails and bearings only in the places where absolutely necessary.
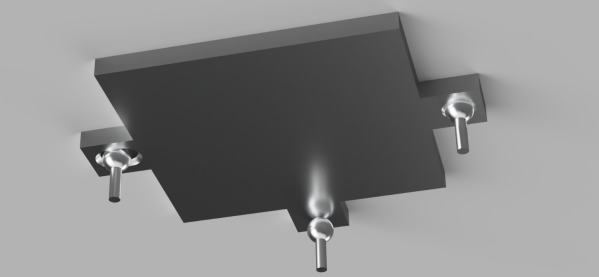
 While this promise might seem abstract, consider the movements made by a 3D printer. Many styles of this machine rely on motor-driven movement along three orthogonal axes: X, Y, and Z. We usually restrict individual motor movement to a single axis by constraining it using a precision part, like a linear rod or rail. However, the details of how we physically constrain the motor’s movements using these parts is a non-trivial task. Overconstrain the axis, and it will either bind or wiggle. Underconstrain it, and it may translate or twist in unwanted directions. Properly constraining a machine’s degrees of freedom is a fundamental aspect of building a solid machine. This is the core subject of the book: how to join these precision parts together in a way that leads to precision movement only in the directions that we want them.
While this promise might seem abstract, consider the movements made by a 3D printer. Many styles of this machine rely on motor-driven movement along three orthogonal axes: X, Y, and Z. We usually restrict individual motor movement to a single axis by constraining it using a precision part, like a linear rod or rail. However, the details of how we physically constrain the motor’s movements using these parts is a non-trivial task. Overconstrain the axis, and it will either bind or wiggle. Underconstrain it, and it may translate or twist in unwanted directions. Properly constraining a machine’s degrees of freedom is a fundamental aspect of building a solid machine. This is the core subject of the book: how to join these precision parts together in a way that leads to precision movement only in the directions that we want them.
Part of what makes this book so fantastic is that it makes no heavy expectations about prior knowledge to pick up the basics, although be prepared to draw some diagrams. Concepts are unfolded in a generous step-by-step fashion with well-diagrammed examples. As you progress, the training wheels come loose, and examples become less-heavily decorated with annotations. In this sense, the book is extremely coherent as subsequent chapters build off ideas from the previous. While this may sound daunting, don’t fret! The entire book is only about 140 pages in length.

 I definitely made a cognitive error. I think a lot of people who get into hardware hacking from the hobby world have a beginning in software. It makes sense, they’re already reading blogs like this one. Maybe they buy an Arduino and start messing around. It’s not long before they buy a 3D printer, and then naturally want to contribute back.
I definitely made a cognitive error. I think a lot of people who get into hardware hacking from the hobby world have a beginning in software. It makes sense, they’re already reading blogs like this one. Maybe they buy an Arduino and start messing around. It’s not long before they buy a 3D printer, and then naturally want to contribute back.