While robotic arms can handle a wide variety of tasks, the specific job at hand will have a major influence on the type of end effector used. For sorting ferromagnetic parts an electromagnet might be enough, while for more accurate location a mechanical gripper could be employed. If you’re working with particularly delicate objects or in concert with human beings, it may be desired to have a force controlled gripper to avoid damage. [James Bruton] has been whipping up a design of his own for just this purpose.
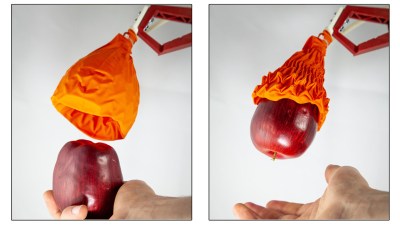
The basic gripper is 3D printed, with 3 fingers consisting of two joints each. Retraction of each finger is courtesy of bungee cord, while extension is via a servo attached to the finger through a spring. The position of each finger is measured with a resistive flex sensor. An Arduino Uno is employed to run the servos and read the attached sensors.
As force is applied by the servo, the spring begins to stretch. This leads to a greater difference between the servo position and the finger position as the applied force increases. By calculating this difference, it’s possible to determine the force applied by the fingers. This can then be used to limit the applied force of the gripper, to avoid breaking delicate objects or crushing soft, fleshy humans.
[James] notes that there are some drawbacks to the current design. The force required to move the fingers is inconsistent along their travel, and this interferes somewhat with accurate measurement. Overall though it’s a solid proof of concept and a good base for further revisions. Files are on Github for those who wish to tinker at home.
Being aware of the forces applied in mechanical settings can be key to getting good results. We’ve even seen arbor presses modified for just such a purpose. Video after the break.
Continue reading “This Force Controlled Robot Gripper Is Less Likely To Break Stuff”