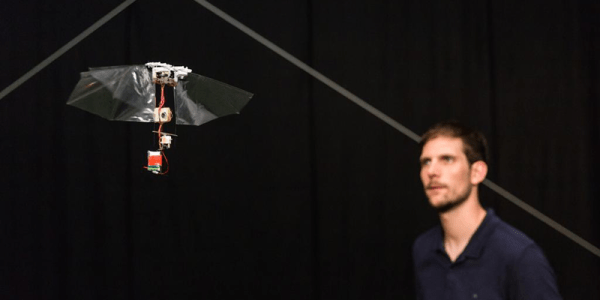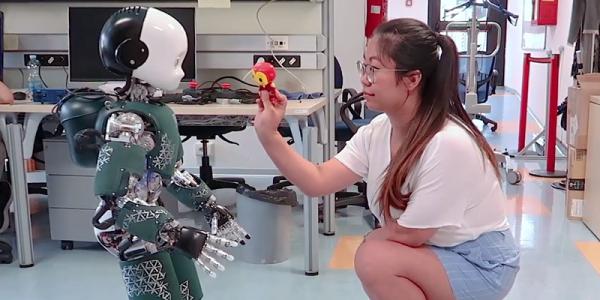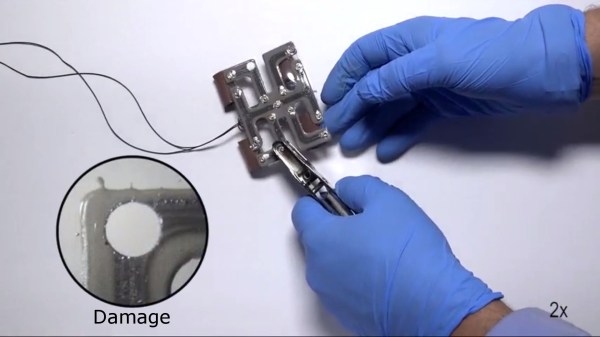
For many of us, our first robots, or technical projects, were flimsy ordeals built with cardboard, duct tape, and high hopes. Most of us grow past that scene, and we learn to work supplies which require more than a pair of kitchen scissors. Researchers at Carnegie Mellon University and Iowa State University have made a material which goes beyond durable, it can heal itself when wounded. To a small robot, a standard hole puncher is a dire assailant, but the little guy in the video after the break keeps hopping around despite a couple of new piercings.
The researcher’s goal is to integrate this substance into bio-inspired robots which may come to harm in the field. Fish-like robots could keep swimming after a brush with a bit of coral or a curious predator. Robot snakes could keep slithering after a fall or a gravel road.
Of course, robotic simulacrums are not the only ones who can benefit from healing circuitry. Satellites are prey to punctures from errant space debris.

 The iconic robot helmets of Daft Punk feature prominently as challenging DIY hardware projects in their own right, and the results never disappoint. But [Nathaniel Stepp]’s
The iconic robot helmets of Daft Punk feature prominently as challenging DIY hardware projects in their own right, and the results never disappoint. But [Nathaniel Stepp]’s  After the whole array was assembled and working, the back of each LED appears to have then been carefully coated in what looks like Plasti-Dip in order to block light, probably to minimize the blinding of the wearer. A small amount of space between each LED allows the eyeballs inside the helmet to see past the light show in the visor.
After the whole array was assembled and working, the back of each LED appears to have then been carefully coated in what looks like Plasti-Dip in order to block light, probably to minimize the blinding of the wearer. A small amount of space between each LED allows the eyeballs inside the helmet to see past the light show in the visor.