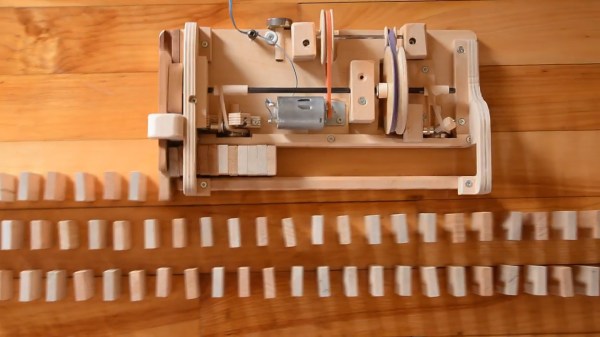
[Matthias Wandel] has come up with another awesome machine, this time a machine that sets up neat rows of dominos. If you’ve followed [Matthias]’s work over the years then you’ll know that this is a wooden version of one he made out of LEGO® back in 2009.
In true [Matthias] fashion he uses just the one motor both for moving the machine along and for pushing the dominos in place. Not satisfied with that efficient use of parts, the rubber band belts that transfer rotation from the motor shaft to the wheels (bearings) double as the rubber surfaces for those wheels. One of many joys from watching [Matthias] work is seeing how he forms wood into shapes that most people would have trouble sculpting from clay. In this case he does this when he needs parts for reaching over his domino magazine to hold a guide rail in place, and of course the parts are well-rounded and clean-looking.
You might also ask, where did he get all the wooden blocks for dominos? He made them of course, all 300 or so.
Be sure to check out the video below of both the build, and of it in action.