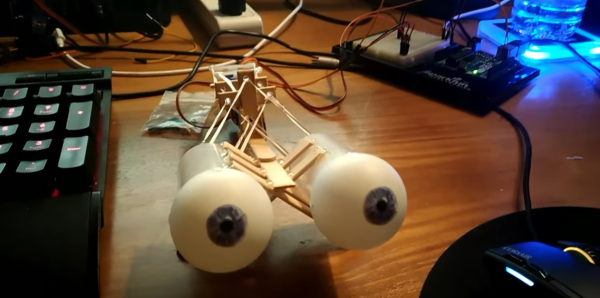
Animatronics for movies is often about making something that works and is reliable in the short term. It doesn’t have to be pretty, it doesn’t have to last forever. [Corporate Sellout] shows us the minimalist approach to building animatronics with this pair of special eyes. These eyes move in both the pan and tilt. Usually, that means a gimbal style mount. Not in this case. The mechanical assembly consists of with popsicle sticks, ping-pong balls, film canisters and dental floss.
The frame for the eyes is made of simple popsicle sticks hot glued together. The eyes themselves are simple ping-pong balls. Arduino powered servos control the movement. The servos are connected to dental floss in a cable arrangement known as a pull-pull system. As each servo moves, one side of the arm pulls on a cable, while the other provides enough slack for the ping-pong ball to move.
Mounting the ping-pong balls is the genius part of this build. They simply sit in the open end of a couple of film canisters. the tension from the dental floss holds everything together. We’re sure it was a finicky setup to build, but once working, it’s reliable. Only a glue joint failure or stretch in the dental floss could cause issues.
There are plenty of approaches to Animatronic eyes. Check out the eyes in this Stargate Horus helmet, which just won our Sci-Fi contest. More recently we saw Gawkerbot, which uses a CD-ROM drive to provide motion for a creepy robot’s eyes.
Continue reading “Look At Me With Your Special Animatronic Eyes”