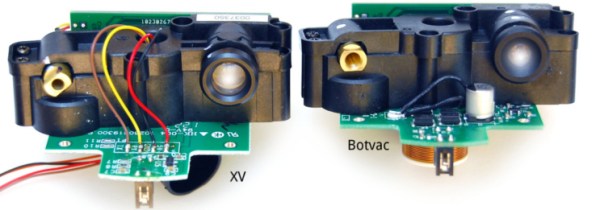
It seems second nature to us and it’s one of the ways we hackers are different from the larger population… sometimes we absolutely insist on buying something that is already broken. Which is where we join [Anton] as he reverse engineers, debugs, and repairs a broken Neato Botvac’s LiDAR system all in the name of having clean floors at a fraction of the cost.
Now keep your head on a swivel ’cause along the way [Anton] has the all-too familiar point in his repair where he puts the original project on hold while he makes a specialized tool he needs to finish the job. It’s hard to tell which is more impressive: turning a laptop webcam into a camera capable of clearly viewing bond wires and (wait for it!) where they are attached on the Silicon, or that he (yeah, we were making a comparison…member?) went straight back to solving the original problem. [Anton] did split this project into two separate blog posts, the first one is linked above and it’s not until the second post that he fixes the original problem. Perhaps there was a bit of scope creep, which was the reason for the separate blog entries? At any rate, [Anton] does a great job documenting the process along with what he calls some ‘juicy pictures’ and you can see a few of them after the break.
It’s been a while since we’ve seen a Neato hack (there’s pun in there somewhere, commenters below us will surely wipe the floor with it). LiDar on the other hand has been covered more recently in a Police LiDAR Tear Down and another post relating more directly to [Anton’s] repair.
Continue reading “Neato Botvac LiDAR Repair Includes Juicy Pics And A Tool Hack”