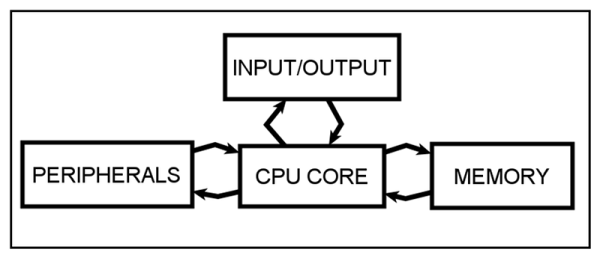
When do you need to use a real-time operating system (RTOS) for an embedded project? What does it bring to the table, and what are the costs? Fortunately there are strict technical definitions, which can also help one figure out whether an RTOS is the right choice for a project.
The “real-time” part of the name namely covers the basic premise of an RTOS: the guarantee that certain types of operations will complete within a predefined, deterministic time span. Within “real time” we find distinct categories: hard, firm, and soft real-time, with increasingly less severe penalties for missing the deadline. As an example of a hard real-time scenario, imagine a system where the embedded controller has to respond to incoming sensor data within a specific timespan. If the consequence of missing such a deadline will break downstream components of the system, figuratively or literally, the deadline is hard.
In comparison soft real-time would be the kind of operation where it would be great if the controller responded within this timespan, but if it takes a bit longer, it would be totally fine, too. Some operating systems are capable of hard real-time, whereas others are not. This is mostly a factor of their fundamental design, especially the scheduler.
In case you hadn’t noticed, it was a bad week for system admins. Pennsylvania-based United Health Services, a company that owns and operates hospitals across the US and UK, was hit by a ransomware attack early in the week. The attack, which appears to be the Ryuk ransomware, shut down systems used by hospitals and health care providers to schedule patient visits, report lab results, and do the important job of charting. It’s not clear how much the ransomers want, but given that UHS is a Fortune 500 company, it’s likely a tidy sum.
And as if an entire hospital corporation’s IT infrastructure being taken down isn’t bad enough, how about the multi-state 911 outage that occurred around the same time? Most news reports seemed to blame the outage on an Office 365 outage happening at the same time, but Krebs on Security dug a little deeper and traced the issue back to two companies that provide 911 call routing services. Each of the companies is blaming the other, so nobody is talking about the root cause of the issue. There’s no indication that it was malware or ransomware, though, and the outage was mercifully brief. But it just goes to show how vulnerable our systems have become.
Our final “really bad day at work” story comes from Japan, where a single piece of failed hardware shut down a $6-trillion stock market. The Tokyo Stock Exchange, third-largest bourse in the world, had to be completely shut down early in the trading day Thursday when a shared disk array failed. The device was supposed to automatically failover to a backup unit, but apparently the handoff process failed. This led to cascading failures and blank terminals on the desks of thousands of traders. Exchange officials made the call to shut everything down for the day and bring everything back up carefully. We imagine there are some systems people sweating it out this weekend to figure out what went wrong and how to keep it from happening again.
With our systems apparently becoming increasingly brittle, it might be a good time to take a look at what goes into space-rated operating systems. Ars Technica has a fascinating overview of the real-time OSes used for space probes, where failure is not an option and a few milliseconds error can destroy billions of dollars of hardware. The article focuses on the RTOS VxWorks and goes into detail on the mysterious rebooting error that affected the Mars Pathfinder mission in 1997. Space travel isn’t the same as running a hospital or stock exchange, of course, but there are probably lessons to be learned here.
As if 2020 hasn’t dealt enough previews of various apocalyptic scenarios, here’s what surely must be a sign that the end is nigh: AI-generated PowerPoint slides. For anyone who has ever had to sit through an endless slide deck and wondered who the hell came up with such drivel, the answer may soon be: no one. DeckRobot, a startup company, is building an AI-powered extension to Microsoft Office to automate the production of “company compliant and visually appealing” slide decks. The extension will apparently be trained using “thousands and thousands of real PowerPoint slides”. So, great — AI no longer has to have the keys to the nukes to do us in. It’ll just bore us all to death.
And finally, if you need a bit of a palate-cleanser after all that, please do check out robotic curling. Yes, the sport that everyone loves to make fun of is actually way more complicated than it seems, and getting a robot to launch the stones on the icy playing field is a really complex and interesting problem. The robot — dubbed “Curly”, of course — looks like a souped-up Roomba. After sizing up the playing field with a camera on an extendable boom, it pushes the stone while giving it a gentle spin to ease it into exactly the right spot. Sadly, the wickedly energetic work of the sweepers and their trajectory-altering brooms has not yet been automated, but it’s still pretty cool to watch. But fair warning: you might soon find yourself with a curling habit to support.
From the time that numeric control started making inroads into machine shops in the middle of the last century until relatively recently, the power of being able to control machine tools with something other than a skilled human hand was evident. Unfortunately, the equipment to do so was expensive, and so NC technology remained firmly in the big shops, where a decent return on investment could be realized.
Fast forward a few decades, and everything that makes the computerized version of NC possible is cheap and easily available. Servos, steppers, drivers, and motion control components can be plugged together into CNC machines that can move a tool to a fixed point in space with incredible accuracy and repeatability. But without CNC software, none of it means a thing.
Enter Linux CNC, the free and open-source CNC package. With support for realtime operation, one-step installations, and a huge range of capabilities provided by a team of volunteer developers and supported by an active community, Linux CNC has democratized the world of CNC machines.
Andy Pugh is a frequent contributor to the Linux CNC codebase and a moderator on the forum. He knows a thing or two about Linux CNC in particular and Linux in the machine shop in general. He’ll stop by the Hack Chat to share his experiences with the Linux CNC project, tell us how Linux can revolutionize the machine shop, and maybe share a few stories from the world of CAD, CAM, and using Linux to make a few chips.
Click that speech bubble to the right, and you’ll be taken directly to the Hack Chat group on Hackaday.io. You don’t have to wait until Wednesday; join whenever you want and you can see what the community is talking about.
[Armstrong] has a lot of good points, although we aren’t sure you need the complexity of a real-time operating system just to squeeze a bag. If anything, that seems like it might make it more susceptible to unexpected operation. However, we agree with his comments that you should have closed-loop control to make sure the device is working, alarming when the device isn’t working, and watchdog timers to guard against lockup.
One of the goals of programming languages back in the 1950s was to create a way to write assembly language concepts in an abstract, high-level manner. This would allow the same code to be used across the wildly different system architectures of that era and subsequent decades, requiring only a translator unit (compiler) that would transform the source code into the machine instructions for the target architecture.
Other languages, like BASIC, would use a runtime that provided an even more abstract view of the underlying hardware, yet at the cost of a lot of performance. Although the era of 8-bit home computers is long behind us, the topic of cross-platform development is still highly relevant today, whether one talks about desktop, embedded or server development. Or all of them at the same time.
Let’s take a look at the cross-platform landscape today, shall we?
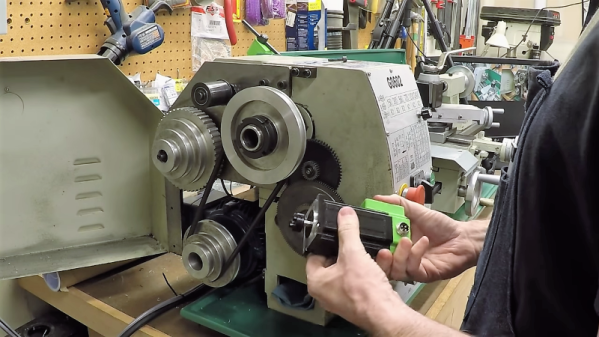
The king of machine tools is the lathe, and if the king has a heart, it’s probably the leadscrew. That’s the bit that allows threading operations, arguably the most important job a lathe can tackle. It’s a simple concept, really – the leadscrew is mechanically linked through gears to the spindle so that the cutting tool moves along the long axis of the workpiece as it rotates, allowing it to cut threads of the desired pitch.
But what’s simple in concept can be complicated in reality. As [Clough42] points out, most lathes couple the lead screw to the spindle drive through a complex series of gears that need to be swapped in and out to accommodate different thread pitches, and makes going from imperial to metric a whole ball of wax by itself. So he set about building an electronic leadscrew for his lathe. The idea is to forgo the gear train and drive the leadscrew directly with a high-quality stepper motor. That sounds easy enough, but bear in mind that the translation of the tool needs to be perfectly synchronized with the rotation of the spindle to make threading possible. That will be accomplished with an industrial-grade quadrature encoder coupled to the spindle, which will tell software running on a TI LaunchPad how fast to turn the stepper – and in which direction, to control thread handedness. The video below has some great detail on real-time operating systems on microcontrollers as well as tests on all the hardware to be used.
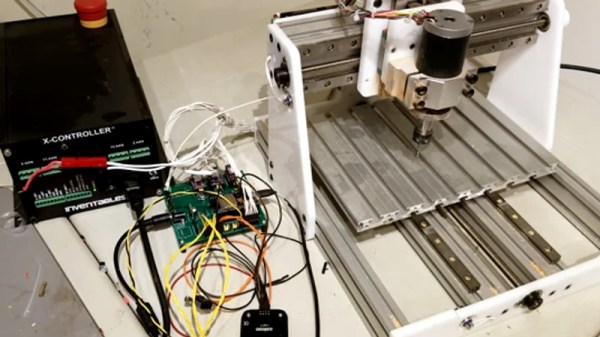
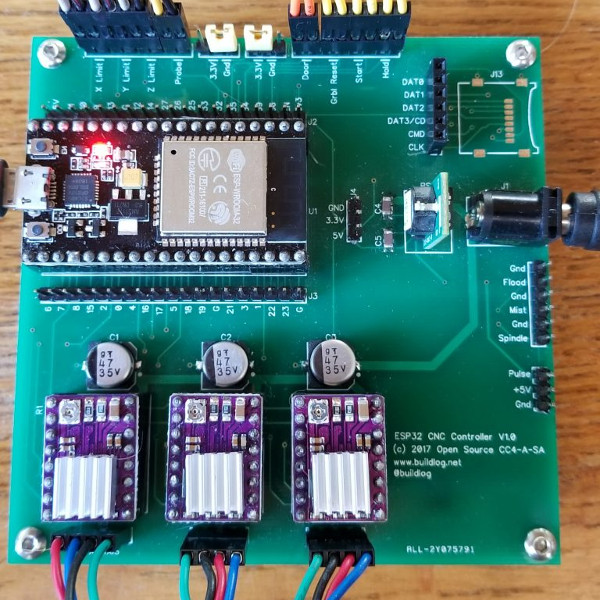
If you’re building a CNC or laser, there’s an excellent chance you’ll be using Grbl to get moving. It’s also a pretty safe bet you’d end up running it on some variation of the Arduino sitting in a motor controller breakout board. It’s cheap, easy to setup and use, and effectively the “industry” standard for DIY machines so there’s no shortage of information out there. What’s not to love?
Well, quite a few things in fact. As [bdring] explains, Grbl pushes the capability of the Arduino to the very limit; making it something of a dead-end for future development. Plus the Arduino needs to be plugged into the host computer via USB to function, a rather quaint idea to many in 2018. These were just some of the reasons he decided to port Grbl to the ESP32 board.
Price wise the Arduino and ESP32 are around the same, but the ESP does have the advantage of being much more powerful than the 8-bit Italian Stallion. Its got way more flash and RAM as well, and perhaps most importantly, includes Wi-Fi and Bluetooth out of the box. It still needs to be plugged into a board to hold the motor drivers like the Arduino, but beyond that [bdring] opines the ESP32 is about as close to the perfect Grbl platform as you can get.
[bdring] reports that porting the code over to the ESP32 wasn’t terrible, but it wasn’t exactly a walk in the park either. The bulk of the code went by without too much trouble, but when it came to the parts that needed precise timing things got tricky. The ESP32 makes use of a Real Time Operating System (RTOS) that’s not too happy about giving up control of the hardware. Turning off the RTOS was an option, but that would nuke Bluetooth and Wi-Fi so obviously not an ideal solution. Eventually he figured out how to get interrupts more or less playing nicely with the RTOS, but mentions there’s still some more work to be done before he’s ready to release the firmware to the public.