Some projects need no complicated use case to justify their development, and so it was with [Janne]’s BeamInk, which mashes a Wacom pen tablet with an xTool F1 laser engraver with the help of a little digital glue. For what purpose? So one can use a digital pen to draw with a laser in real time, of course!
Pen events from the drawing tablet get translated into a stream of G-code that controls laser state and power.
Here’s how it works: a Python script grabs events from a USB drawing tablet via evdev (the Linux kernel’s event device, which allows user programs to read raw device events), scales the tablet size to the laser’s working area, and turns pen events into a stream of laser power and movement G-code. The result? Draw on tablet, receive laser engraving.
It’s a playful project, but it also exists as a highly modular concept that can be adapted to different uses. If you’re looking at this and sensing a visit from the Good Ideas Fairy, check out the GitHub repository for more technical details plus tips for adapting it to other hardware.
[neos-builder] wrote in to let us know about their innovation: the HORUS Framework — Hybrid Optimized Robotics Unified System — a production-grade robotics framework built in Rust for real-time performance and memory safety.
This is a batteries included system which aims to have everything you might need available out of the box. [neos-builder] said their vision is to create a robotics framework that is “thick” as a whole (we can’t avoid this as the tools, drivers, etc. make it impossible to be slim and fit everyone’s needs), but modular by choice.
[neos-builder] goes on to say that HORUS aims to provide developers an interface where they can focus on writing algorithms and logic, not on setting up their environments and solving configuration issues and resolving DLL hell. With HORUS instead of writing one monolithic program, you build independent nodes, connected by topics, which are run by a scheduler. If you’d like to know more the documentation is extensive.
The list of features is far too long for us to repeat here, but one cool feature in addition to the real-time performance and modular design that jumped out at us was this system’s ability to process six million messages per second, sustained. That’s a lot of messages! Another neat feature is the system’s ability to “freeze” the environment, thereby assuring everyone on the team is using the same version of included components, no more “but it works on my machine!” And we should probably let you know that Python integration is a feature, connected by shared-memory inter-process communication (IPC).
Here’s some fascinating work presented at SIGGRAPH 2023 of a method for radiance field rendering using a novel technique called Gaussian Splatting. What’s that mean? It means synthesizing a 3D scene from 2D images, in high quality and in real time, as the short animation shown above shows.
Neural Radiance Fields (NeRFs) are a method of leveraging machine learning to, in a way, do what photogrammetry does: synthesize complex scenes and views based on input images. But NeRFs work in a fraction of the time, and require only a fraction of the source material. There are different ways to go about this and unsurprisingly, there tends to be a clear speed vs. quality tradeoff. But as the video accompanying this new work seems to show, clever techniques mean the best of both worlds.
A short video summary is embedded just below the page break. Interested in deeper details? The research PDF is here. The amount of development this field has seen is nothing short of staggering, and certainly higher in quality than what was state-of-the-art for NeRFs only a year ago.
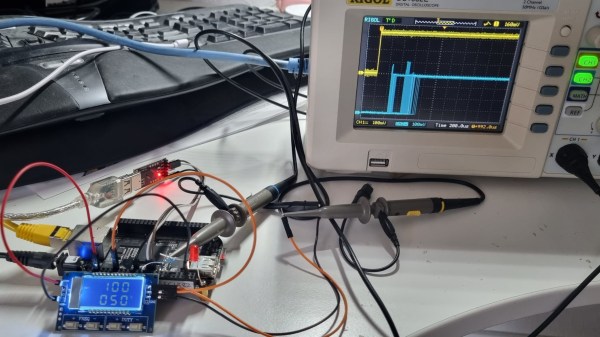
When debugging something as involved as kernel scheduler timings, you would typically use one of the software-based debugging mechanisms available. However, in cases when software is close to bare metal, you don’t always need to do that. Instead, you can output a signal to a GPIO, and then use a logic analyzer or a scope to measure signal change timing – which is what [Albert David] did when evaluating Linux kernel’s PREEMPT_RT realtime operation patches.
When you reach for a realtime kernel, latency is what you care about – realtime means that for everything you do, you need to get a response within a certain (hopefully very short) interval. [Albert] wrote a program that reads a changing GPIO input and immediately writes the new state back, and scoped both of the signals to figure out the latency of of the real-time patched kernel as it processes the writes. Overlaying all the incoming and outgoing signals on the same scope screen, you can quickly determine just how suitable a scheduler is when it comes to getting an acceptable response times, and [Albert] also provides a ready-to-go BeagleBone image you can use for your own experiments, or say, in an educational environment.
What could you use this for? A lot of hobbyists use realtime kernels on Linux when building CNC machine controllers and robots, where things like motor control put tight constraints on how quickly a decision in your software is translated into real-world consequences, and if this sounds up your valley, check out this Linux real-time task tutorial from [Andreas]. If things get way too intense for a multi-tasking system like Linux, you might want to use a RTOS to begin with, and we have a guide on that for you, too.
[Armstrong] has a lot of good points, although we aren’t sure you need the complexity of a real-time operating system just to squeeze a bag. If anything, that seems like it might make it more susceptible to unexpected operation. However, we agree with his comments that you should have closed-loop control to make sure the device is working, alarming when the device isn’t working, and watchdog timers to guard against lockup.
Last year a team of researchers published a paper detailing a method of boosting visual contrast and image quality in stereoscopic displays. The method is called Dichoptic Contrast Enhancement (DiCE) and works by showing each eye a slightly different version of an image, tricking the brain into fusing the two views together in a way that boosts perceived image quality. This only works on stereoscopic displays like VR headsets, but it’s computationally simple and easily implemented. This trick could be used to offset some of the limitations of displays used in headsets, for example making them appear capable of deeper contrast levels than they can physically deliver. This is good, because higher contrasts are generally perceived as being more realistic and three-dimensional; important factors in VR headsets and other stereoscopic displays.
Stereoscopic vision works by having the brain fuse together what both eyes see, and this process is called binocular fusion. The small differences between what each eye sees mostly conveys a sense of depth to us, but DiCE uses some of the quirks of binocular fusion to trick the brain into perceiving enhanced contrast in the visuals. This perceived higher contrast in turn leads to a stronger sense of depth and overall image quality.
Example of DiCE-processed images, showing each eye a different dynamic contrast range. The result is greater perceived contrast and image quality when the brain fuses the two together.
To pull off this trick, DiCE displays a different contrast level to both eyes in a way designed to encourage the brain to fuse them together in a positive way. In short, using a separate and different dynamic contrast range for each eye yields an overall greater perceived contrast range in the fused image. That’s simple in theory, but in practice there were a number of problems to solve. Chief among them was the fact that if the difference between what each eyes sees is too great, the result is discomfort due to binocular rivalry. The hard scientific work behind DiCE came from experimentally determining sweet spots, and pre-computing filters independent of viewer and content so that it could be applied in real-time for a consistent result.
Things like this are reminders that we experience the world only through the filter of our senses, and our perception of reality has quirks that can be demonstrated by things like this project and other “sensory fusion” edge cases like the Thermal Grill Illusion, which we saw used as the basis for a replica of the Pain Box from Dune.
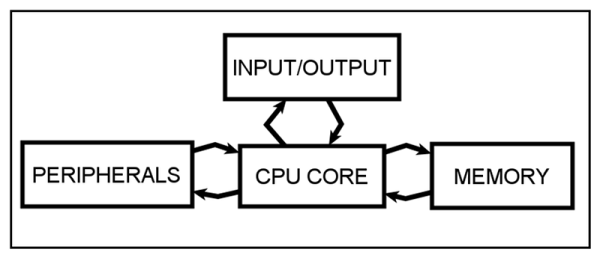
Zephyr is an open source real-time operating system (RTOS) that appeared on the scene a few years ago with support for a few boards. The new 1.11 release adds a lot of features, a lot of new boards, and also has a Windows development environment. But don’t worry, the environment is portable so it still runs on Linux and Mac, as well.
The OS has support for many ARM and x86 boards. It also supports ESP32, NIOS II, and can also target Linux which is useful for debugging or studying execution using desktop tools.