We could all use a hug once in a while. Most people would probably say the shared warmth is nice, and the squishiness of another living, breathing meatbag is pretty comforting. Hugs even have health benefits.
But maybe you’re new in town and don’t know anyone yet, or you’ve outlived all your friends and family. Or maybe you just don’t look like the kind of person who goes for hugs, and therefore you don’t get enough embraces. Nearly everyone needs and want hugs, whether they’re great, good, or just average.
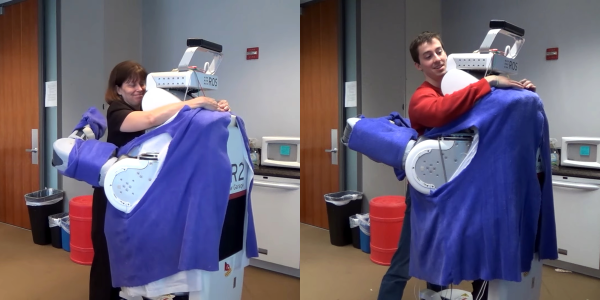
So what makes a good hug, anyway? It’s a bit like a handshake. It should be warm and dry, with a firmness appropriate to the situation. Ideally, you’re both done at the same time and things don’t get awkward. Could a robot possibly check all of these boxes? That’s the idea behind HuggieBot, the haphazardly humanoid invention of Katherine J. Kuchenbecker and team at the Max Planck Institute for Intelligent Systems in Stuttgart, Germany (translated). User feedback helped the team get their arms around the problem.
If your jealousy for Festo robots is festering, fret not! [mikey77] has shown us that, even without giant piggy banks, we can still construct some fantastic soft robotics projects with a 3D printer and a visit to the hardware store. To get started, simply step through the process with this 3D Printed Artificial Muscles: Erector Set project on Instructables.
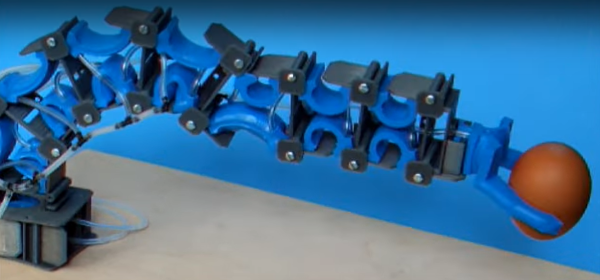
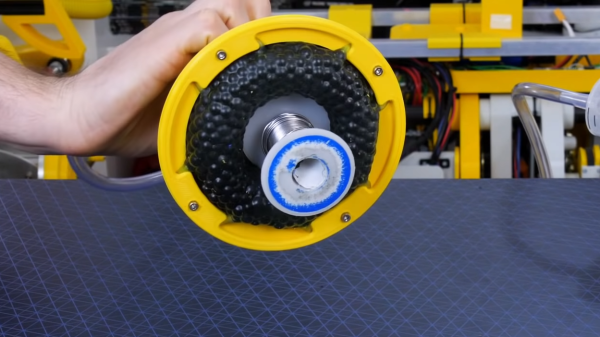
In a nutshell, [mikey77] generously offers us a system for designing soft robots built around a base joint mechanism: the Omega Muscle. Fashioned after its namesake, this base unit contains an inflatable membrane that expands with pressure and works in tandem with another Omega Muscle to produce upward and downward angular movement. Each muscle also contains two endpoints to connect to a base, a gripper, or more Omega Muscles. Simply scale them as needed and stack them to produce a custom soft robot limb, or use the existing STLs to make an articulated soft gripper.
This project actually comes in two parts for robot brawns and brains. Not only does [mikey77] take us through the process for making Omega muscles, we also get a guide for building the pressure system designed to control them. Taken together, it’s a feature-complete setup for exploring your own soft robotics projects with a great starting project. Stay tuned after the break for a demo video in action. There’s no audio, but we’re sure you’ll be letting off an audible pssssh in satisfaction to follow along.
It’s not every day that we see FFF-based 3D printers making parts that need to be airtight. And [mikey77’s] success has us optimistic for seeing more air muscles in future projects down the road. In the meantime, have a look at the silicone-silicon half-breeds that we’ve previously caught pumping iron.
In a year of semiconductor shortages it’s a difficult task to deliver an electronic conference badge, so this year’s BornHack camp in Denmark had an SAO prototyping board as its badge. Some people made blinkies with theirs, but that wasn’t enough for [Inne] who had to go a step further with a light-up pneumatic bubble badge. It’s based upon a previous project producing silicone inflatable bubbles, but in a portable badge form.
On the front of the PCB is a multi-colour LED for illumination, while on the back is a small microcontroller board, a pressure sensor, and a motor driver circuit. A small air pump and battery sits in a pocket connected by a cable and a flexible tube, allowing the bubble to inflate at will. An interesting detail was the use of a cut-down hypodermic needle to carry the air through the silicone wall of the bubble. When seen up close at the camp it was an unnervingly organic effect, if there’s an uncanny valley of badges this is it.
We don’t see much in the way of soft robotics on these pages, so this happy crossover with BadgeLife is a special treat. It’s not entirely alone here though.
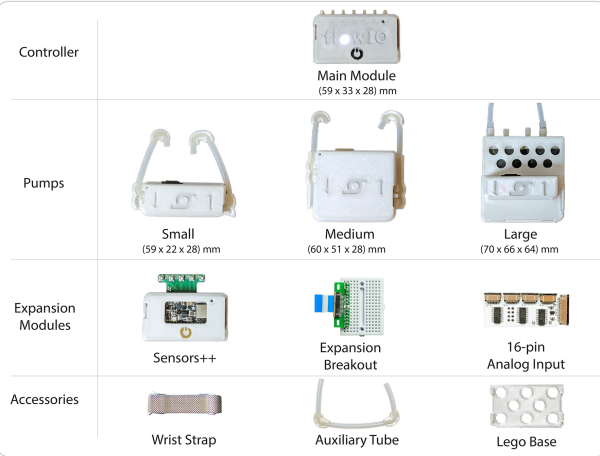
Hackaday Prize 2021 entry FlowIO Platform promises to be to pneumatics what Arduino is to Electronics. The modular platform comprises a common controller/valve block, a selection of differently sized pumps, and a few optional connectivity and sensing blocks. With Arduino software support as well as as Javascript and web-GUI, there’s a way to program this no matter what the level of experience the user has.
This last point is a critical one for the mission [Ali Shtarbanov] from the MIT Media Lab is setting out for this project. He reminds us that in decades gone by, there was a significant barrier to entry for anyone building electronics prototypes. Information about how to get started was also much harder to by before the internet really got into gear.
It’s a similar story for software, with tools like Scratch and Python lowering the barrier to entry and allowing more people to get their toes wet and build some confidence.
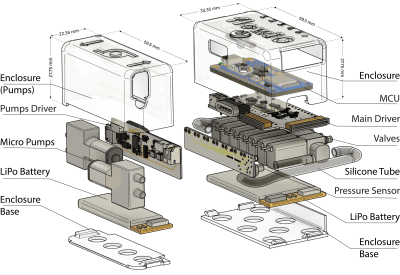
But despite some earlier work by projects like the Soft Robotics Toolkit and Programmable-Air, making a start on lowering the bar for pneumatics support for soft robotics, and related applications, the project author still finds areas for further improvement. FlowIO was designed from the ground-up to be wearable. It appears to be much smaller, more portable and supports more air ports and a greater array of sensing and connectivity than previous Open Source work to date.
Creative Commons Hardware
Whilst you can take all the plans (free account signup required) and build yourself a FlowIO rig of your very own, the project author offers another solution. Following on from the Wikipedia model of free sharing and distribution of information, FlowIO offers its hardware for free, for the common good. Supported by donations to the project, more hardware is produced and distributed to those who need it. The only ask is that redundant kits are passed on or returned to base for upgrade, rather than landfill.
Soft robotic grippers have some interesting use cases, but the industrial options are not cheap. [James Bruton] was fascinated by the $4000 “bean bag” gripper from Empire Robotics, so he decided to build his own.
The gripper is just a flexible rubber membrane filled with small beads. When it is pushed over a object and the air is sucked out, it holds all the beads together, molded to the shape of the object. For his version [James] used a soft rubber ball filled with BBs. To create a vacuum, he connected a large 200cc syringe to the ball via a hose, and actuated it with a high torque servo.
It worked well for small, light objects but failed on heavier, smooth objects with no edges to grip onto. This could possibly be improved if the size and weight of the beads/BBs are reduced.
[James Bruton]’s impressive portfolio of robots has always used conventional rigid components, so he decided to take a bit of a detour and try his hand at a soft robot. Using a couple of few inflatable pool noodles for quick prototyping, his experiments quickly showed some of the strengths and weaknesses of soft robots.
Most of the soft robots we see require an external air source to inflate cells in the robot and make the limbs actuate. Taking inspiration from a recent Stanford research project, [James] decided to take an alternative approach, using partially inflated tubes and squeezing them in one section to make the other sections more rigid. He bought a couple of cheap pool noodles and experimented with different methods of turning them into actuators. The approach he settled on was a pair of noodles tied together side by side, and then folded in half by an elastic cord. As one end is squeezed by a servo bellows, the internal pressure overcomes the tension from the elastic cord, and the “elbow” straightens out.
[James] tested various arrangements of these limbs to build a working hexapod robot but to no avail. The simple actuating mechanism was simply too heavy, and could just lift itself slightly. This highlighted a common theme in almost all the soft pneumatic robots we’ve seen: they carry very little weight and are always tethered to an external air supply. The combination of stretchy materials and relatively low pressure compressed air can only handle small loads, at least in Earth gravity and above water. Continue reading “Pool Noodle Robot Shines A Light On The Pros And Cons Of Soft Robots”→
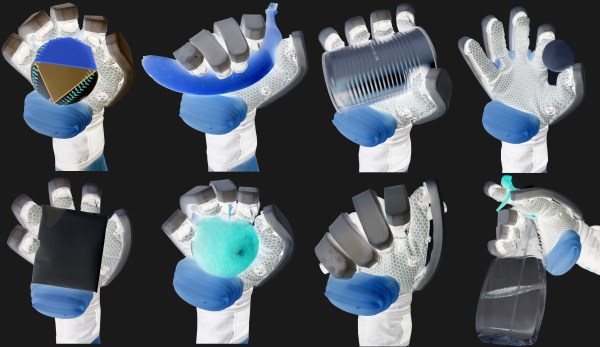
We have to hand it to this team, their entry for the 2020 Hackaday Prize is a classic pincer maneuver. A team from [The University of Auckland] in New Zealand and [New Dexterity] is designing a couple of gloves for both rehabilitation and human augmentation. One style is a human-powered prosthetic for someone who has lost mobility in their hand. The other form uses soft robotics and Bluetooth control to move the thumb, fingers, and an extra thumb (!).
The human-powered exoskeleton places the user’s hand inside a cabled glove. When they are in place, they arch their shoulders and tighten an artificial tendon across their back, which pulls their hand close. To pull the fingers evenly, there is a differential box which ensures pressure goes where it is needed, naturally. Once they’ve gripped firmly, the cables stay locked, and they can relax their shoulders. Another big stretch and the cords relax.
In the soft-robotic model, a glove is covered in inflatable bladders. One set spreads the fingers, a vital physical therapy movement. Another bladder acts as a second thumb for keeping objects centered in the palm. A cable system draws the fingers closed like the previous glove, but to lock them they evacuate air from the bladders, so jamming layers retain their shape, like food in a vacuum bag.
We are excited to see what other handy inventions appear in this year’s Hackaday Prize, like the thumbMouse, or how about more assistive tech that uses hoverboards to help move people?