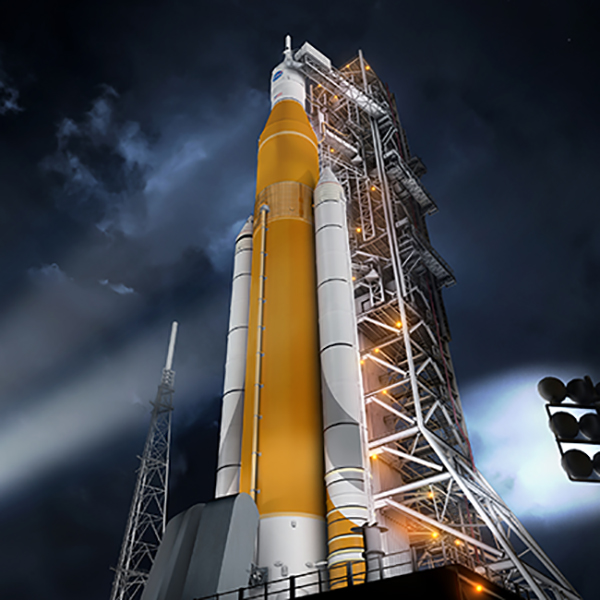
Hundreds of years from now, the story of humanity’s inevitable spread across the solar system will be a collection of engineering problems solved, some probably in heroic fashion. We’ve already tackled a lot of these problems in our first furtive steps into the wider galaxy. Our engineering solutions have taken humans to the Moon and back, but that’s as far as we’ve been able to send our fragile and precious selves.
While we figure out how to solve the problems keeping us trapped in the Earth-Moon system, we’ve sent fleets of robotic emissaries to do our exploration by proxy, to make the observations we need to frame the next set of engineering problems to be solved. But as we reach further out into the solar system and beyond, our exploration capabilities are increasingly suffering from communications bottlenecks that restrict how much data we can ship back to Earth.
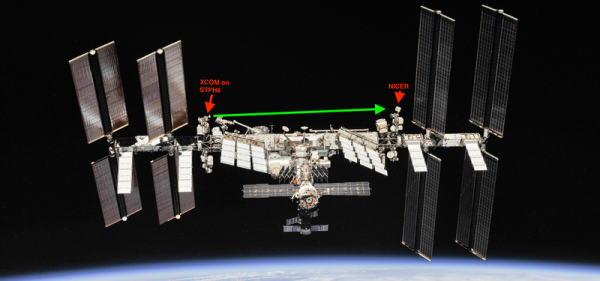
We need to find a way to send vast amounts of data back as quickly as possible using as few resources as possible on both ends of the communications link. Doing so may mean turning away from traditional radio communications and going way, way up the dial and developing practical means for communicating with X-rays.
Continue reading “X-Rays Are The Next Frontier In Space Communications”




 What would Star Wars be without the sounds of an epic battle in space where there should be no sound? But there are plenty of other examples where things are wrong and it would have been just as easy to get them right — the direction of space debris in the movie Gravity, for example. But what about the age-old trope of explosive decompression? Some movies show gross body parts flying everywhere. Others show distressed space travelers surviving in space for at least brief periods.
What would Star Wars be without the sounds of an epic battle in space where there should be no sound? But there are plenty of other examples where things are wrong and it would have been just as easy to get them right — the direction of space debris in the movie Gravity, for example. But what about the age-old trope of explosive decompression? Some movies show gross body parts flying everywhere. Others show distressed space travelers surviving in space for at least brief periods.