What’s the first thing you want after installing solar? All the sunshine you can get, of course. Especially if you did it in the wintertime. And what would be more fun than monitoring your power generation, especially leading up to the equinox, or start of spring? Probably not much, especially if you built a cute solar power gauge like [Ben] did to keep him from obsessively checking his phone.
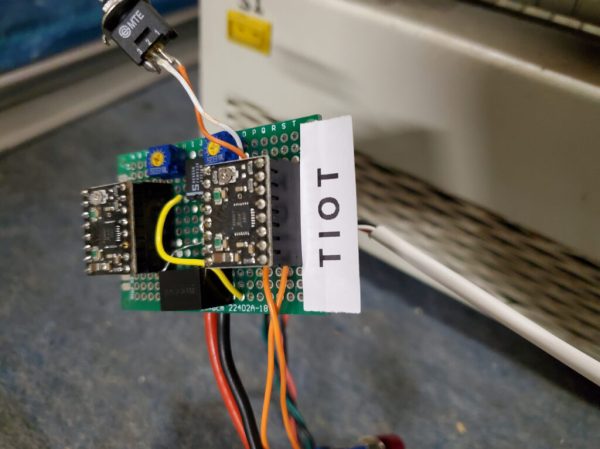
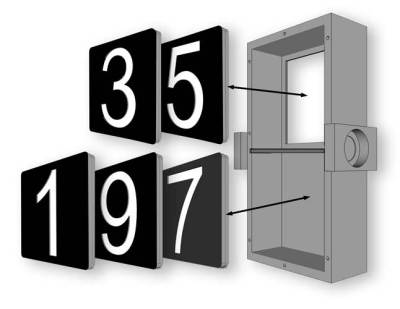
At the heart of this build is the affordable Seeed Xiao ESP32C3, which controls an equally cost-effective automotive stepper via an L293D H-bridge driver. Then it was just a matter of hooking it into Home Assistant. As power is generated by the solar system, the cute little sun on the gauge rises and shows the kilowattage gained.
Unfortunately there’s no real data sheet for the stepper, so [Ben] opted to use the 5 V from the USB that’s powering the ESP32. However, it seems like this might not be enough power because the gauge appears to drift a bit. To fix this, [Ben] runs the stepper_init script twice a day, which cranks the dials all the way forward then all the way backward before settling on the last known value.
Are you interested in solar? Here’s how you can build a small power system.