Much like calling over a buddy or two to help with moving a large piece of furniture and pivot it up a narrow flight of stairs, so too can quadcopters increase their carrying capacity through the power of friendship and cooperation. However, unless you want to do a lot of yelling at your mates about when to pivot and lift, you’d better make sure that your coordination is up to snuff. The same is true with quadcopters, where creating an efficient coordination algorithm for sharing a load is far from easy and usually leads to fairly slow and clumsy maneuvering.
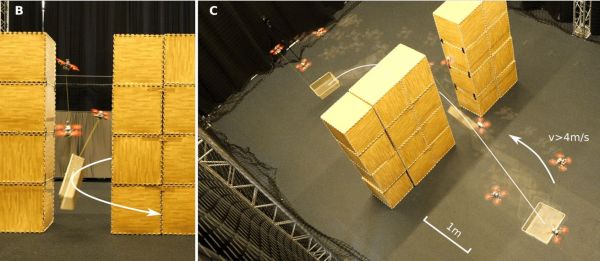
Recently. researchers at the Technical University of Delft came up with what appears to be a quite efficient algorithm for this purpose. In the demonstration video below, it’s easy to see how the quadcopters make short work of even convoluted obstacles while keeping themselves and their mates from getting tangled.
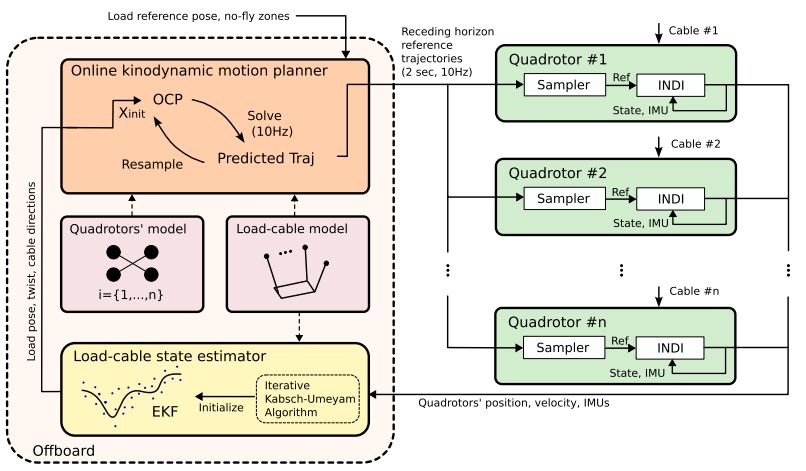
The research by [Sihao Sun] et al. appears in Science Robotics (preprint), in which they detail their trajectory-based framework and its kinodynamic motion planner. In short, this planner considers the whole-body dynamics of the load, the cables, and the quadcopters. An onboard controller for each quadcopter is responsible for translating the higher-level commands into specific changes to its rotor speeds and orientation.
Along with tests of its robustness to various environmental factors, such as wind, the researchers experimented with how many simultaneous quadcopters could work together with their available computing capacity. The answer, so far, is nine units, though they think that the implementation can be further optimized.
Of course, sometimes you just want to watch synchronized drones.
Continue reading “Using Multiple Quadcopters To Efficiently Lift Loads Together”

















