Drones fill the sky raining hellfire on unsuspecting civilians below. Self-driving cars only cause half as many accidents as carbon-based drivers. Autonomous vehicles are the future, no matter how bleak that future is. One thing we haven’t seen much of is autonomous marine vehicles, be they submarines, hovercrafts, or sailboats. That’s exactly what [silvioBi] is building for his entry into the Hackaday Prize: a sailboat that will ply the waters of Italy’s largest lake.
Every boat needs a hull, but this project will need much more, from electronics to solar panels to sensors. Luckily for [silvio], choosing a hull is as simple as heading over to eBay. [silvio] picked up a fiberglass boat hull for about €40 that fill fit both is needs and his workbench.
The electronics are a bit trickier, but the basic plan is to cover the deck with solar panels, and use a few sensors including GPS, IMU, and an anemometer to steer this sailboat around a lake. Building an autonomous vehicle is a hard challenge, and for the electronics, [silvio] has a trick up his sleeve: he’s using redundant electronics. All the sensors are connected via an I2C bus, so why not put two microcontrollers on that bus in a master and slave configuration? It won’t add much mass, and given the problems had by a few of the teams behind robotic sailing competitions, a bit of redundancy isn’t a bad thing to have.










 One of [Andrey]’s
One of [Andrey]’s 
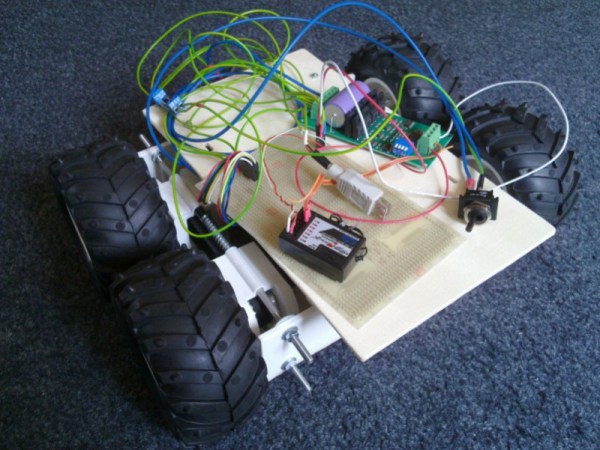
 Next [Vlad] took to the water. His first attempt was a home-built airboat, which looked awesome but unfortunately didn’t work very well. Finally he ended up buying a $20 boat off of eBay and made a MOSFET-based motor controller to drive its dual thrusters. This design worked much better and after a bit of PID tuning, the boat was autonomously navigating between waypoints in the water. In the future [Vlad] plans to use the skills he learned on this project to make an autopilot for the
Next [Vlad] took to the water. His first attempt was a home-built airboat, which looked awesome but unfortunately didn’t work very well. Finally he ended up buying a $20 boat off of eBay and made a MOSFET-based motor controller to drive its dual thrusters. This design worked much better and after a bit of PID tuning, the boat was autonomously navigating between waypoints in the water. In the future [Vlad] plans to use the skills he learned on this project to make an autopilot for the 









