Join us Wednesday at noon Pacific time for the Python and the Internet of Things Hack Chat!
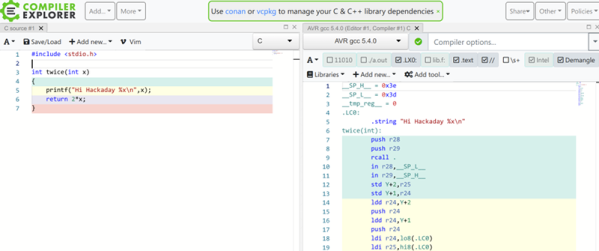
Opinions differ about what the most-used programming language in right now is, but it’s hard to deny both the popularity and versatility of Python. In the nearly 30 years since it was invented it has grown from niche language to full-blown development environment that seems to be everywhere these days. That includes our beloved microcontrollers now with MicroPython, and Adafruit’s CircuitPython, greatly lowering the bar for entry-level hackers and simplifying and speeding development for old hands and providing a path to a Python-powered Internet of Things .
.
The CircuitPython team from Adafruit Industries – Dan Halbert, Kattni Rembor, Limor “Ladyada” Fried, Phillip Torrone, and Scott Shawcroft – will drop by the Hack Chat to answer all your questions about Python and the IoT. Join us as we discuss:
- How CircuitPython came to be;
- The range of IoT products that support Python;
- Getting started with Python on IoT devices; and
- What’s on the horizon for a Python-powered IoT?
And as extra enticement, we’ll be giving away five free one-year passes to Adafruit.io! We’ll draw five names at random from the list of Hack Chat attendees. Stop by for a chance to win. And, the Adafruit team will be streaming video live during the Hack Chat as well.
You are, of course, encouraged to add your own questions to the discussion. You can do that by leaving a comment on the Python and the Internet of Things Hack Chat and we’ll put that in the queue for the Hack Chat discussion.
 Our Hack Chats are live community events on the Hackaday.io Hack Chat group messaging. This week we’ll be sitting down on Wednesday, April 3, at noon, Pacific time. If time zones have got you down, we have a handy time zone converter.
Our Hack Chats are live community events on the Hackaday.io Hack Chat group messaging. This week we’ll be sitting down on Wednesday, April 3, at noon, Pacific time. If time zones have got you down, we have a handy time zone converter.
Click that speech bubble to the right, and you’ll be taken directly to the Hack Chat group on Hackaday.io. You don’t have to wait until Wednesday; join whenever you want and you can see what the community is talking about.
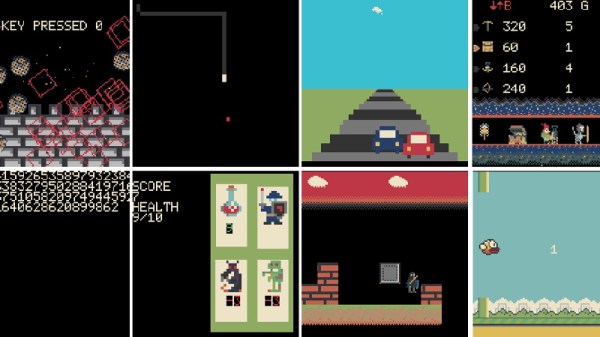
Want a quick peek at what’s possible with CircuitPython? Check out this PyPortal event countdown timer that just happens to be counting down the hours till the next Hack Chat.