When it comes to building a neural network to simulate complex behavior, Arduino isn’t exactly the first platform that springs to mind. But when your goal is to model the behavior of an organism with only a handful of neurons, the constraints presented by an Arduino start to make sense.
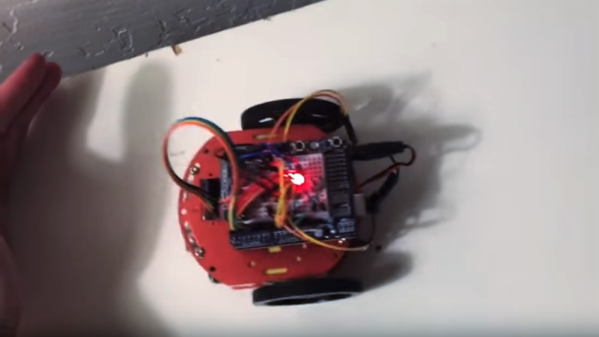
It may be the most important non-segmented worm you’ve never heard of, but Caenorhabditis elegans, mercifully abbreviated C. elegans, is an important model organism for neurobiology, having had its entire nervous system mapped in 2012. [Nathan Griffith] used this “connectome” to simulate a subset of the diminutive nematode’s behaviors, specifically movements toward attractants and away from obstacles. Riding atop a small robot chassis, the Arduino sends signals to the motors when the model determines it’s time to fire the virtual worm’s muscles. An ultrasonic sensor stands in for the “nose touch” neurons of the real worm, and when the model is not busy avoiding a touch, it’s actively seeking something to eat using the “chemotaxis” behavior. The model is up on GitHub and [Nathan] hopes it provides an approachable platform for would-be neuroroboticists.
This isn’t the first time someone has modeled the nematode’s connectome in silico, but kudos to [Nathan] for accomplishing it within the constraints an Arduino presents.
Continue reading “Nematoduino: A Roundworm Neural Model On An Arduino”


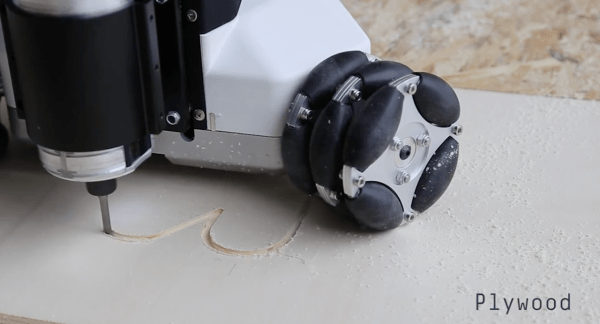
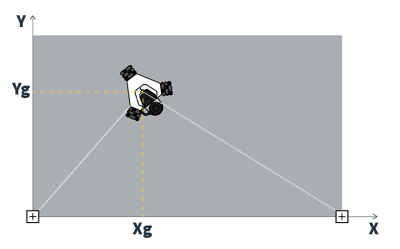 What really caught our eye is the Goliath’s unique positioning system. While most CNC machines have the luxury of end-stops or servomotors capable of precise positional control, the Goliath has two “base sensors” that are tethered to the top of the machine and mounted to the edge of the workpiece. Each sensor connects to the host computer via USB and uses vaguely termed “Radio Frequency technology” that provides a 100Hz update for the machine’s coordinate system. This setup is sure to beat out dead-reckoning for positional awareness, but details are scant on how it precisely operates. We’d love to know more if you’ve used a similar setup for local positioning as this is still a daunting task for indoor robots.
What really caught our eye is the Goliath’s unique positioning system. While most CNC machines have the luxury of end-stops or servomotors capable of precise positional control, the Goliath has two “base sensors” that are tethered to the top of the machine and mounted to the edge of the workpiece. Each sensor connects to the host computer via USB and uses vaguely termed “Radio Frequency technology” that provides a 100Hz update for the machine’s coordinate system. This setup is sure to beat out dead-reckoning for positional awareness, but details are scant on how it precisely operates. We’d love to know more if you’ve used a similar setup for local positioning as this is still a daunting task for indoor robots.