We’re certainly familiar with vacuum grabbers used in manufacturing to pick items up, but this is a bit different. [James Wigglesworth] sent in some renders and demo video (embedded after the break) of the Dexter robot arm and a laser cutter automatically producing face shields.
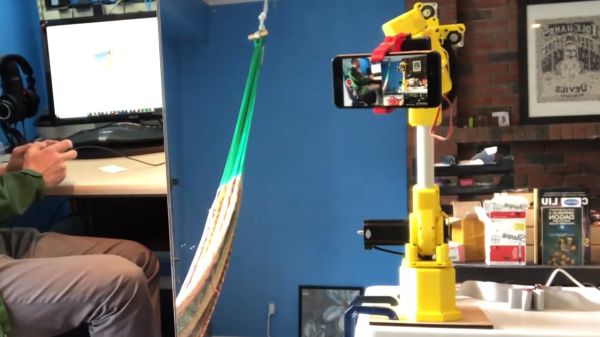
 It’s a nice little bit of automation, where you can see a roll of plastic on the right side of the Glowforge laser cutter feeding into the machine. Once the laser does its thing, the the robot arm reaches in and grabs the newly cut face shield and stacks it in a box neatly for future assembly. There are a lot of interesting parts here, but the fact that the vacuum grabber is doing it’s job without a vacuum air supply is the one we have our eye on.
It’s a nice little bit of automation, where you can see a roll of plastic on the right side of the Glowforge laser cutter feeding into the machine. Once the laser does its thing, the the robot arm reaches in and grabs the newly cut face shield and stacks it in a box neatly for future assembly. There are a lot of interesting parts here, but the fact that the vacuum grabber is doing it’s job without a vacuum air supply is the one we have our eye on.
The vacuum comes from a corrugated sleeve that makes up the suction cup on the end of the robot arm. A rubber band holds a hinged piece over a valve on that sleeve that can be opened or closed by a servo motor. When the cuff is compressed against the face shield, the servo closes the valve, using the tape as a gasket, and the corrugated nature of the cuff creates a vacuum due to the weight of the item it is lifting. This means you don’t need a vacuum source plumbed into the robot, just a wire to power the servo.



The robot arm is of course the design that won the 2018 Hackaday Prize. I comes as no surprise to see the Haddington Dynamics crew setting up a manufacturing line like this one. As we discovered a few weeks ago, 3D printers, laser cutters, and robot arms are part of their microfactory setup and well suited to making PPE to help reduce the shortage during the COVID-19 outbreak.
Continue reading “Clever Suction For Robot Arm Automates Face Shield Production”