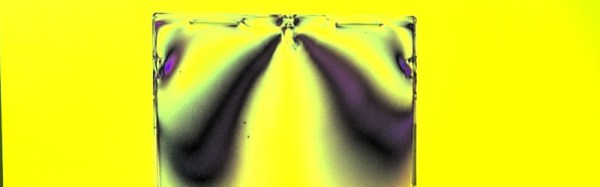
One of last year’s Hackaday Prize finalists was the DOLPi, [Dave Prutchi]’s polarimetric camera which used an LCD sheet from a welder’s mask placed in front of a Raspberry Pi camera. Multiple images were taken by the DOLPi at different polarizations and used to compute images designed to show the polarization of the light in each pixel and convey it to the viewer through color.
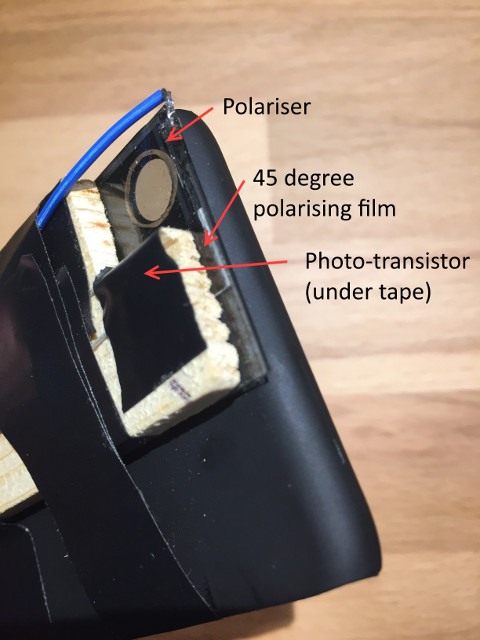
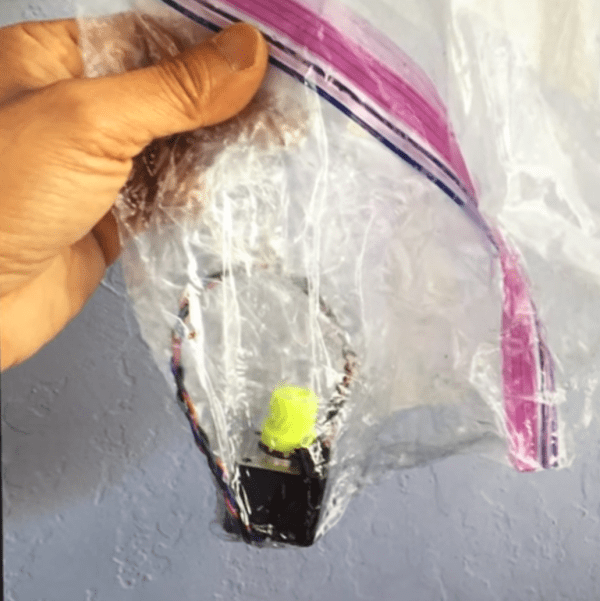
[Dave] wrote to tip us off about [Paul Wallace]’s take on the same idea, a DOLPi-inspired polarimetric camera using an iPhone with an ingenious solution to the problem of calibrating the device to the correct polarization angle for each image that does not require any electrical connection between phone and camera hardware. [Paul]’s camera is calibrated using the iPhone’s flash. The light coming from the flash through the LCD is measured by a phototransistor and Arduino Mini which sets the LCD to the correct polarization. The whole setup is taped to the back of the iPhone, though we suspect a 3D-printed holder could be made without too many problems. He provides full details as well as code for the iPhone app that controls the camera and computes the images on his blog post.
We covered the DOLPi in detail last year as part of our 2015 Hackaday Prize finalist coverage. You can also find its page on Hackaday.io, and [Dave]’s own write-up on his blog.