One aspect of the Raspberry Pi that has always challenged us is the power supply. It was a great idea to power the board from a standard micro-USB port because economy of scale makes phone chargers (even in the 1A range necessary for stable operation of the RPi) cheap and easy to acquire. The thing we miss is the ability to power the device on and off using the built-in hardware. The quandary has given rise to many different solutions, and the ATX Raspbi smart PSU is one of the better ones we’ve come across. It’s a nicely packaged take on the PIC-based version we saw earlier in the year.
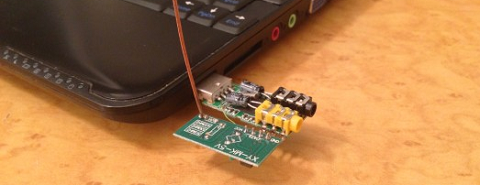
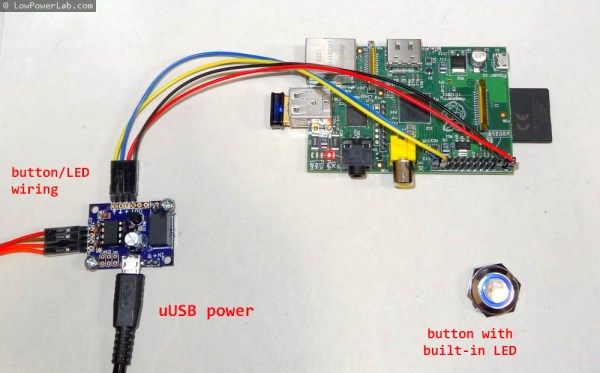
The device is a small PCB that acts bridge between the micro-USB power supply and the RPi board. It offers several breakout headers, one of which is used for a power button. The button is monitored by a microcontroller that switches the on-board relay accordingly. But it won’t just kill the power when you want to shut down. It first signals one of the RPi GPIO pins, causing the OS to execute a shutdown script. It then monitors the RPi for the shutdown tasks to finish before cutting the power.
Continue reading “ATX Raspi Is A Smart Power Source For Raspberry Pi”