For those who choose to let their cats live a more or less free-range life, there are usually two choices. One, you can adopt the role of servant and run for the door whenever the cat wants to get back inside from their latest bird-murdering jaunt. Or two, install a cat door and let them come and go as they please, sometimes with a “present” for you in their mouth. Heads you win, tails you lose.
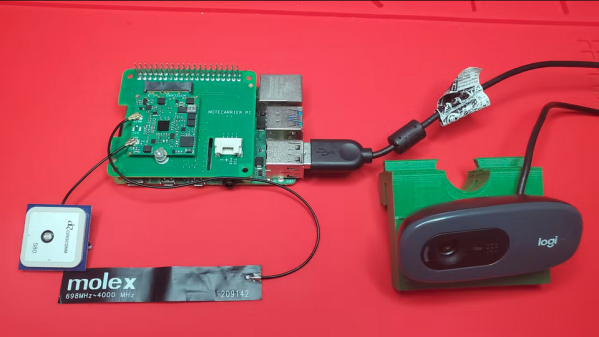
There’s another way, though: just let the cat ask to be let back in. That’s the approach that [Tennis Smith] took with this machine-learning kitty doorbell. It’s based on a Raspberry Pi 4, which lives inside the house, and a USB microphone that’s outside the front door. The Pi uses Tensorflow Lite to classify the sounds it picks up outside, and when one of those sounds fits the model of a cat’s meow, a message is dispatched to AWS Lambda. From there a text message is sent to alert [Tennis] that the cat is ready to come back in.
There’s a ton of useful information included in the repo for this project, including step-by-step instructions for getting Amazon Web Services working on the Pi. If you’re a dog person, fear not: changing from meows to barks is as simple as tweaking a single line of code. And if you’d rather not be at the beck and call of a cat but still want to avoid the evidence of a prey event on your carpet, machine learning can help with that too.
[via Tom’s Hardware]