In most mechanical systems, metal gears that bend are a bad thing. But not so for strain wave gearing, which is designed to take advantage of a metal gear flexing to achieve an action much like planetary gears. The fun isn’t limited to metal anymore, though, if you 3D print a strain wave gear like this.
Strain-wave gearing is nothing new – it was invented in 1957 and has traveled to the moon on the lunar rover. And you may recall [Kristine Panos]’ recent article on a LEGO strain wave gear, which makes it easy to visualize how they work. She also has a great description of how the flex spline, wave generator, and circular spline interact, so we’ll spare those details here. [Simon Merret]’s interpretation of the strain wave gear is very simple and similar to other 3D-printed versions, except that he uses an inside-out timing belt as the flex spline. The wave generator is just an arm with a roller bearing at each end, and despite needing a few tweaks the gear does an admirable job.
Simon is reaching out for help in getting this gear ready for use where the industrial versions see frequent application – the first and second degrees of freedom of robotic arms. If you’ve got any ideas, head over to his project page on Hackaday.io and pitch in.
Continue reading “3D-Printed Strain Wave Gear Needs Your Help”

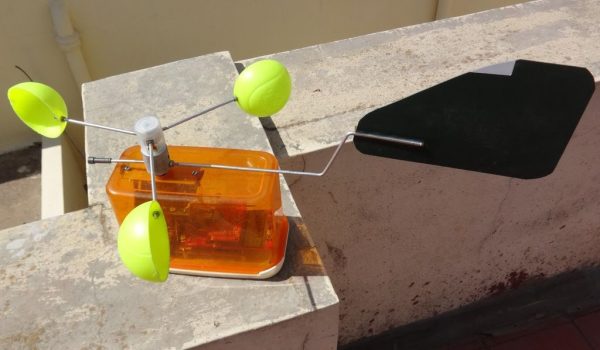
 We have to admit that when we first saw [Ajoy Raman]’s Instructables post, we figured that he used a universal motor to generate a voltage from the anemometer. But [Ajoy]’s solution to the coaxial shafts problem is far more interesting than that. A discarded universal motor donated its rotor and bearings. The windings were stripped off the assembly leaving nothing but the commutator. 1kΩ SMD resistors were soldered across adjacent commutator sections to form a series resistance of 22kΩ with taps every 1k, allowing 0 to 2.2V to be read to the ADC of a microcontroller depending on the angle of the vane.
We have to admit that when we first saw [Ajoy Raman]’s Instructables post, we figured that he used a universal motor to generate a voltage from the anemometer. But [Ajoy]’s solution to the coaxial shafts problem is far more interesting than that. A discarded universal motor donated its rotor and bearings. The windings were stripped off the assembly leaving nothing but the commutator. 1kΩ SMD resistors were soldered across adjacent commutator sections to form a series resistance of 22kΩ with taps every 1k, allowing 0 to 2.2V to be read to the ADC of a microcontroller depending on the angle of the vane.