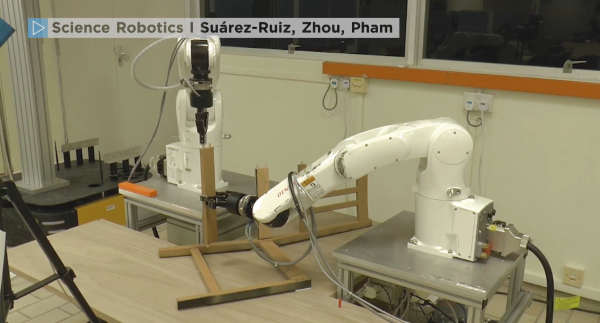
Hackaday pages are rife with examples of robots being built with furniture parts. In this example, the tables are turned and robots are the masters of IKEA pieces. We are not silly enough to assume that these robots unfolded the instructions, looked at one another, scratched their CPUs, and began assembling. Of course, the procedure was preordained by the programmers, but the way they mate the pegs into the ends of the cross-members is a very human thing to do. It reminds us of finding a phone charging socket in the dark. This kind of behavior is due to force feedback which tell the robots when a piece is properly seated which means that they can use vision to fit the components together without sub-millimeter precision.
All the hardware used to make the IKEA assembler is publicly available, and while it may be out of the typical hacker price range, this is a sign of the times as robots become part of the household. Currently, the household robots are washing machines, smart speakers, and 3D printers. Ten years ago those weren’t Internet connected machines so it should be no surprise if robotic arms join the club of household robots soon. Your next robotics project could be the tipping point that brings a new class of robots to the home.
Back to our usual hijinks, here is a robot arm from IKEA parts and a projector built into a similar lamp. or a 3D printer enclosed in an IKEA cabinet for a classy home robot.
Continue reading “Tables Are Turned As Robots Assemble IKEA Furniture”