Researchers have been playing around with various oddball forms of robot locomotion; surely, we’ve seen it all, haven’t we? Not so! Lucky for us, [researchers at Stanford] are now showing us a new way for robots to literally extrude themselves from point A to point B.
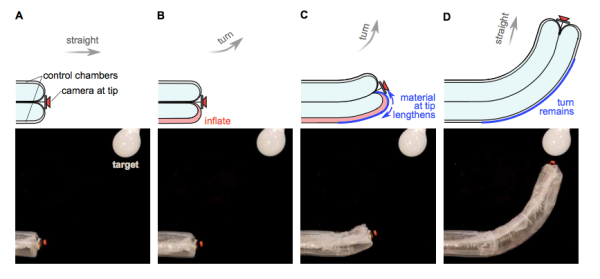
This robot’s particular motion for mechanism involves unwinding itself inside out. From a stationary base, a reel caches meters of the robot’s uninflated polyethylene body, which it deploys by pressurizing. Researchers can make full 3D turns by varying the amount of inflated air in outer control chambers. What’s more, they can place end effectors or even payloads at the tip of the growing end with their position held in place by a cable.
As we can imagine, any robot that can squeeze its way up to 72 meters long can have dozens of applications, and the folks at Stanford have explored a host of nooks and crannies of this space. Along the way, they deploy complex antenna shapes into the air, deliver small payloads, extinguish fires, and squeeze through all sorts of uninviting places such as flytraps and even a bed of nails. We’ve placed a video below the break, but have a look at Ars Technica’s full video suite to get a sense of the sheer variety of applications that they imparted upon their new creation.
Biomimetics tends to get us to cry “gecko feet” or “snake robots” without thinking too hard. But these forms of locomotion that come to mind all seem to derive from the animal kingdom. One key element of this soft robot is that its stationary base and vine-like locomotion both have its roots in the plant kingdom. It’s a testament to just how unexplored this realm may be, and that researchers and robots will continue to develop new ways of artificially “getting around” for years to come.
Thanks for the tip, [Jacob!]
Continue reading “Researchers Squeeze Out A New Breed Of Robot Locomotion”