Space balloons, where one sends instrument packages to the edge of space on a weather balloon, are a low-cost way to scratch the space itch. But once you’ve logged the pressure and temperature and tracked your balloon, what’s the next challenge? How about releasing an autonomous glider and having it return itself to Earth safely?
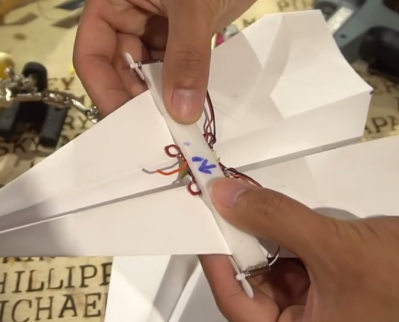
That’s what [IzzyBrand] and his cohorts did, and we have to say we’re mightily impressed. The glider itself looks like nothing to write home about: in true Flite Test fashion, it’s just a flying wing made with foam core and Coroplast reinforced with duct tape. A pair of servo-controlled elevons lies on the trailing edge of the wings, while inside the fuselage are a Raspberry Pi and a Pixhawk flight controller along with a GPS receiver. Cameras point fore and aft, a pair of 5200 mAh batteries provide the juice, and handwarmers stuffed into the avionics bay prevent freezing.
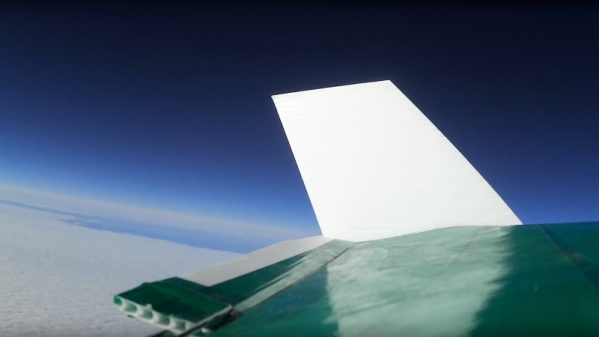
After a long series of test releases from a quadcopter, flight day finally came. Winds aloft prevented a full 30-kilometer release, so the glider was set free at 10 kilometers. The glider then proceeded to a pre-programmed landing zone over 80 kilometers from the release point. At one point the winds were literally pushing the glider backward, but the little plane prevailed and eventually spiraled down to a perfect landing.
We’ve been covering space balloons for a while, but take a moment to consider the accomplishment presented here. On a shoestring budget, a team of amateurs hit a target the size of two soccer fields with an autonomous aircraft from a range of almost 200 kilometers. That’s why we’re impressed, and we can’t wait to see what they can do after a release from the edge of space.
Continue reading “Autonomous Spaceplane Travels To 10 Km, Lands Safely 200 Km Away”