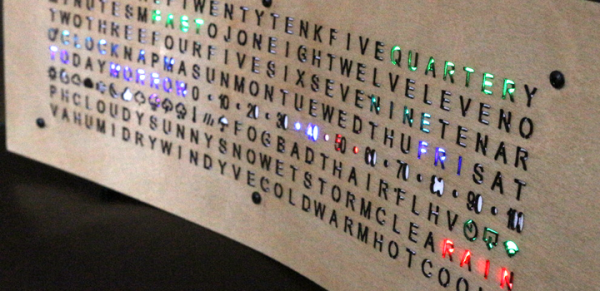
Word clocks are a neat twist on traditional timepiece user interfaces. Spelling out the time with words and phrases rather than numerals fancies up a clock nicely. And if you add the current weather and forecast to the display, you get this attractive and handy word-based time and weather display.
For this clock, one of the many custom builds on [GMG]’s site that betray a certain passion for unusual timepieces, an 8×32 array of Neopixels lives behind a laser-cut sheet of steam-bent birch plywood. Each pixel is masked by either an alphanumeric character or an icon representing weather conditions. An ESP8266 fetches time and weather data and drives the display serially, controlling the color of each cell and building up the display. The video below shows the clock doing its thing.
Sure, we’ve featured plenty of word clocks before, even some with weather display, but we like the slim and understated design of this build. We’re particularly impressed by the lengths [GMG] took in packing as much capability into the 256-pixel display as possible, like the way “today” and “tomorrow” overlap. And if you’ve got an eye for detail, you might spot what gets displayed when it’s over 80° and 80% relative humidity.
Continue reading “Slim And Classy Word Clock Shows The Weather Too”







 Lastly, ED-E, can turn things in the house on and off. This is accomplished in 100% Hackaday-approved (if not UL-approved) style with a device that appears to be a lamp cable fed into a spray painted Altoids tin.
Lastly, ED-E, can turn things in the house on and off. This is accomplished in 100% Hackaday-approved (if not UL-approved) style with a device that appears to be a lamp cable fed into a spray painted Altoids tin.








