As we’ve learned from past experience, videos from [HowToLou] tend to be a bit controversial. His unique style of expedient engineering isn’t everyone’s cup of tea, especially when it’s combined with a devil-may-care attitude towards safety. On the other hand, there’s no arguing that his methods get results. His video on converting an 18 HP riding mower into something akin to a go-kart is a perfect example.
The first phase of the project involves removing all the hardware related to mowing, as obviously you won’t be cutting any grass while pushing speeds of 48 kph (30 mph). This both saves weight, and removes a lot of mechanical complication that would be in the way of further modification. That said, it also leaves the mower immobile, as there’s no longer be any connection between the engine and transaxle.
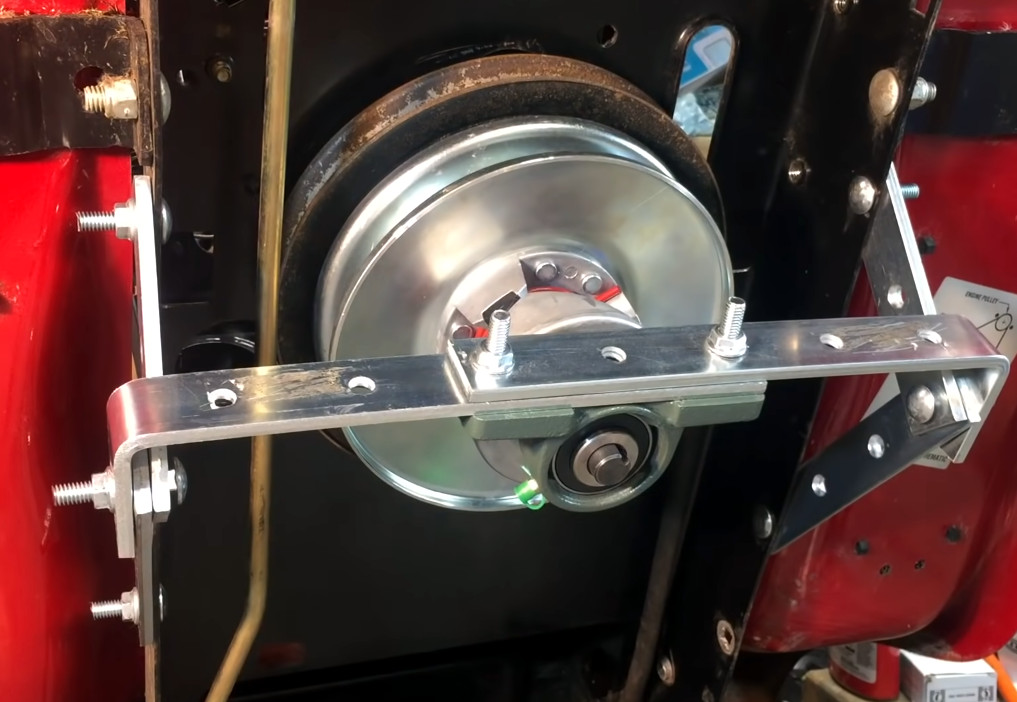
In its place, [HowToLou] installs an off-the-shelf torque converter kit that uses a continuously variable transmission (CVT) clutch. As he quickly demos, the CVT technology allows the gear ratio to automatically adapt to the engine RPM thanks to pulleys that change their size depending on how fast they’re spinning. It’s a big improvement over the system he originally yanked out, though as you might expect, fitting it into the mower required some custom work. The final step was to pull the old pulley off of the transaxle and replace it with one that’s less than half the original size.
Wearing his protective flip-flops, [HowToLou] hops on the souped-up mower and is nearly thrown off the back of it as soon as he steps on the gas. Clearly the modifications were a success, and the video ends with some open road testing — presumably he’s riding off to the store to go buy a helmet.
We actually missed this video when it first made the rounds, but it has since picked up steam and is pulling in some impressive numbers. [HowToLou] tells us he thinks it’s due to the fact that a lot of people are upgrading to more modern zero-turn mowers, meaning there’s a surplus of these second-hand mini tractors on the market. Whatever the reason, we’re happy to see this backyard engineer get some mainstream success; his methods might not always be by the book, but they’re always entertaining.
Continue reading “Riding Mower CVT Upgrade Really Gets Things Moving”