We’re getting to the point that seeing 3D printed parts in a project or hack isn’t as exciting as it was just a few years ago. The proliferation of low-cost desktop 3D printers means that finding a printer to squirt out a few parts for your build isn’t the adventure it once was. Gone are the days of heading to a local hackerspace or college hoping their janky Mendel felt like working that day. But all that really means is that hackers and makers now have the ability to utilize 3D printing even more. Forget printing one or two parts of your design, just print the whole thing.
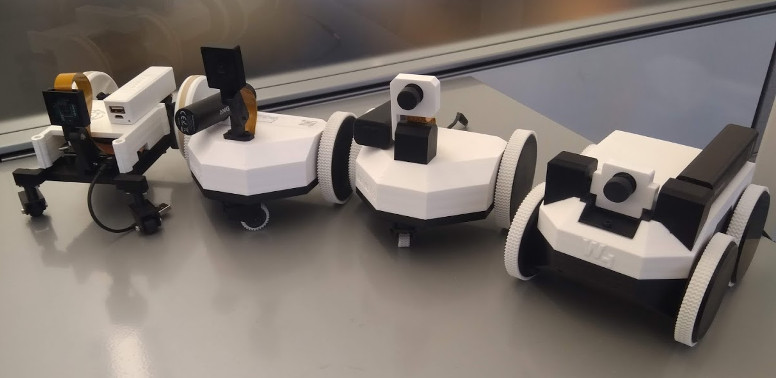 That’s exactly what [Nik Ivanov] did with Watney, his fully 3D printed rover project. After lamenting that many so-called 3D printed rovers were anything but, he set out to design one that was not only made primarily of printed parts, but was robust enough to put some real work in. Over the course of several design iterations, he built a very capable all-wheel drive platform that needs only some electronics and a handful of M3 screws to leap into action.
That’s exactly what [Nik Ivanov] did with Watney, his fully 3D printed rover project. After lamenting that many so-called 3D printed rovers were anything but, he set out to design one that was not only made primarily of printed parts, but was robust enough to put some real work in. Over the course of several design iterations, he built a very capable all-wheel drive platform that needs only some electronics and a handful of M3 screws to leap into action.
As long as you’ve got a 3D printer big enough to handle the roughly 120mm x 190mm dimensions of this bot’s body, you’re well on the way to owning your very own video rover. [Nik] recommends printing everything in PETG, no doubt for its increased strength when it comes to things like the drive gears. Plus it’s low warp, which is really going to help when printing the top and bottom sections of the body. TPU is advised for the tires, but if you don’t have any (or your printer chokes on flexible filaments) you can just wrap the wheels with wide rubber bands.
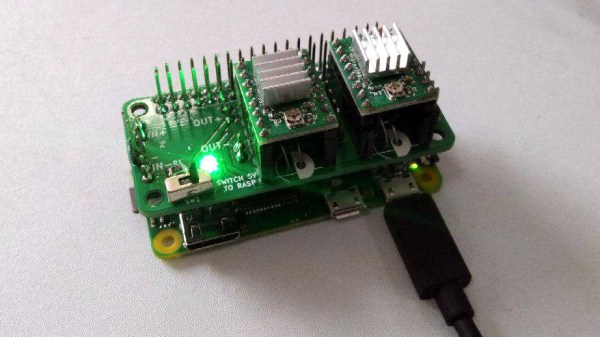
[Nik] is using a Raspberry Pi Zero W as the brains of the operation, but the beauty of an open platform like this is that you could easily swap out the controls for something else to meet your needs. In addition to the Pi, there’s a L298N H-bridge motor controller to interface with the dual geared motors, as well as a servo to provide tilt for the SainSmart camera module.
We’ve often been surprised at just how expensive commercial robotics platforms can be, so we’re keenly interested in seeing if the availability of designs like this spur on DIY rover development. Though if you’re looking for something a little more rough and tumble, we’ve seen a 3D printed rover that looks combat-ready.
Continue reading “Watney: A Fully 3D Printed Rover Platform”