Breaking into the world of auto racing is easy. Step 1: Buy an expensive car. Step 2: Learn how to drive it without crashing. If you’re stuck at step 1, and things aren’t looking great for step 2 either, you might want to consider going with a virtual Porsche or Ferrari and spending your evenings driving virtual laps rather than real ones.
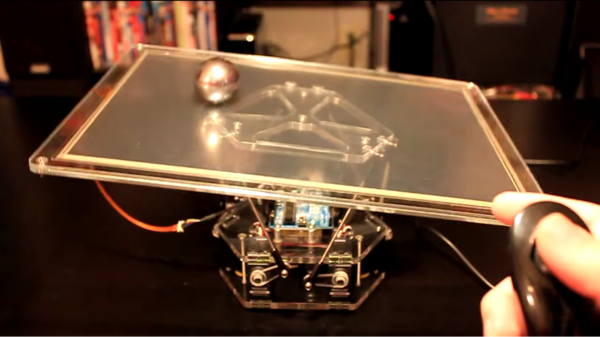
The trouble is, that can get a bit boring after a while, which is what this DIY motion simulator platform is meant to address. In a long series of posts with a load of build details, [pmvcda] goes through what he’s come up with so far on this work in progress. He’s building a Stewart platform, of the type we’ve seen before but on a much grander scale. This one will be large enough to hold a race car cockpit mockup, which explains the welded aluminum frame. We were most interested in the six custom-made linear actuators, though. Aluminum extrusions form the frame holding BLDC motor, and guide the nut of a long ball screw. There are a bunch of 3D-printed parts in the actuators, each of which is anchored to the frame and to the platform by simple universal joints. The actuators are a little on the loud side, but they’re fast and powerful, and they’ve got a great industrial look.
If car racing is not your thing and you’d rather build a full-motion flight simulator, here’s one that also uses DIY actuators.
Continue reading “Homebrew Linear Actuators Put The Moves On This Motion Simulator”




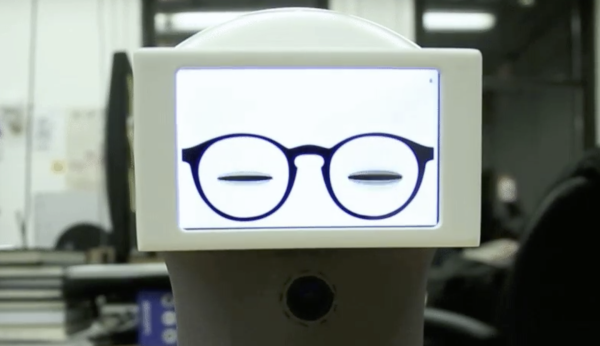
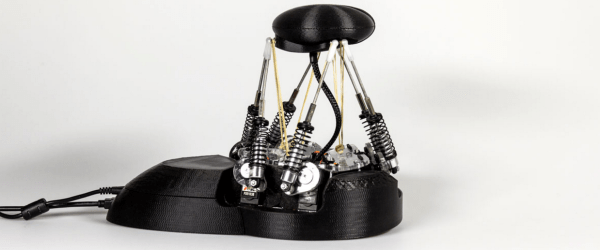
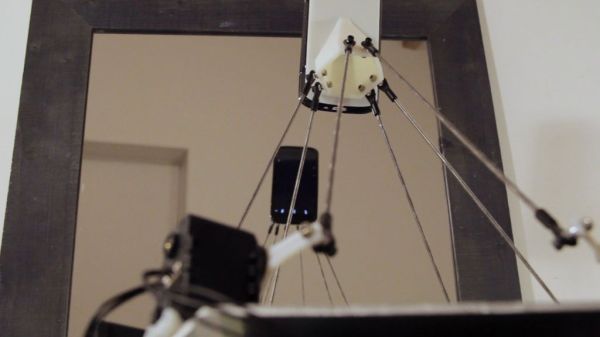
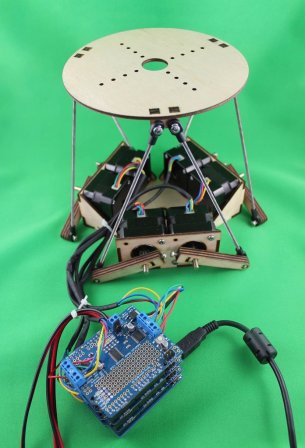
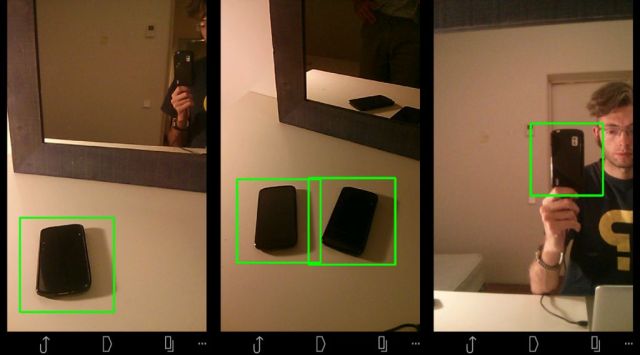 Hardware-wise, the #selfie bot is a Stewart platform made from six servo motors and a few pieces of carefully measured pushrod connected with swivel-ball-links. An android phone is mounted on the end effector which acts functionally as the robot’s face and eyes. To make it self-aware in a sense, [Ajna] and [Hersan] created their own recognition software with Open CV using a collection of sample images of various phones as reference points. As soon as the robot recognizes itself in the mirror as indicated by specific words flashing on its screen, it takes a picture, immediately uploading it to its own
Hardware-wise, the #selfie bot is a Stewart platform made from six servo motors and a few pieces of carefully measured pushrod connected with swivel-ball-links. An android phone is mounted on the end effector which acts functionally as the robot’s face and eyes. To make it self-aware in a sense, [Ajna] and [Hersan] created their own recognition software with Open CV using a collection of sample images of various phones as reference points. As soon as the robot recognizes itself in the mirror as indicated by specific words flashing on its screen, it takes a picture, immediately uploading it to its own